Napredak i visoke tehnologije značajno olakšavaju naš život, u njegovim najrazličitijim manifestacijama, na primjer, u svakodnevnom životu, u velikim i malim industrijama, pa čak i u poljoprivredi. I ako su se ranije poljoprivredom bavili isključivo ljudi i životinje, danas se posvuda koriste razne poljoprivredne mašine i oprema visoke tehnologije. Konkretno, primjer takve korisne i, bez sumnje, visokotehnološke opreme je navigator za traktor (sustav paralelne vožnje), koji omogućava mašini da se kreće po unaprijed određenoj ruti.
Prednosti navigacije za traktore očigledne su svima onima koji znaju da broje novac i vole da mudro raspoređuju i štede svoje finansije. Na primjer, navigacijski uređaji vam omogućavaju:
- Štedite gorivo i gorivo.
- Optimizirajte kretanje opreme unutar polja i s jednog polja na drugo.
- Povećajte opterećenje opreme za 2 ili čak 3 puta.
Rezultat je jasna ušteda novca!
Sistem paralelne vožnje je ugradnja posebnog vizuelnog ekrana - pokazivača smjera, kontrolera i GPS prijemnika. Ovaj sistem omogućava vam da zapamtite traženi kurs usmjeravanjem traktora paralelno s prethodno položenom linijom. Na ekranu će biti prikazano da li slijedite ili skrećete sa označene putanje.
Istovremeno, navigacija omogućava ne samo ravnolinijsku obradu polja, već i krivolinijsku, minimizirajući vjerovatnoću pojave praznina između susjednih redova. One. žetva će biti ubrana skoro 100%.
Na osnovu rezultata rada, vozač traktora će dobiti potpuni izvještaj prikazan na monitoru.
Koje vrste navigacije za traktore postoje?
Trenutno postoje dva glavna tipa navigacije za traktore - autopilot i sistem paralelne vožnje.
Autopilot vam omogućava da smanjite opterećenje na osobu (vozač traktora će samo okrenuti opremu). Također, zahvaljujući autopilotu, moguće je obavljanje poslova, na primjer, za vrijeme slabe vidljivosti (slaba kiša, magla, pa čak i noću), što značajno povećava produktivnost rada i omogućava da se vozilo koristi za 24 sata dnevno ( naravno, ako njegov dizajn to dozvoljava).
Međutim, svaki od navigacijskih sistema na tržištu se razlikuje po određenim karakteristikama i bilo bi lijepo znati na koje parametre obratiti pažnju i koje nijanse uzeti u obzir prilikom kupovine.
Visok kvalitet displeja
Displej je jedan od najvažnijih elemenata sistema paralelne vožnje, čiji kvalitet direktno određuje udobnost rada.
Ekran visokog kvaliteta treba da bude:
- Svijetle i kontrastne - informacije bi trebale biti lako čitljive čak i po sunčanom vremenu. Mat ekran neće blještati na suncu. Također je poželjno da uređaj ima funkcije kontrole svjetline pozadinskog osvjetljenja i noćni način rada kako bi se smanjio opterećenje očiju operatera.
- Veliki i široki ekran. Mogućnost da vidite više - bolja kontrola paralelne vožnje.
- Izdržljiv i zaštićen. Kućište mora biti zaštićeno od vlage i prašine, a materijali koji se koriste u uređaju moraju biti 100% visokog kvaliteta.
Funkcionalnost
Važno je da se sve kontrole nalaze što je moguće pogodnije, jednostavne i razumljive. Obratite pažnju na veličinu dugmadi (velikih ili malih), jezik menija itd. Navigator za traktor mora u potpunosti da se pridržava fraze „napravljen za ljude“. Sljedeće funkcije su potrebne:
- Vožnja u pravoj liniji. Ovde je sve jasno - crtamo linija A-B a uređaj poravna preostale paralelne prave linije za vožnju.
- Besplatan način vožnje. Prvo putovanje na traktoru može se obaviti po zakrivljenoj putanji, nakon čega će uređaj prikazati upite za nastavak vožnje, kopirajući putanju kojom se vozilo upravo kretalo.
- Mogućnost "Nastavak" bilo kojeg odjeljka sačuvanog u memoriji uređaja.
- Mogućnost ručnog „uređivanja polja“ sa umetanjem obrađenih površina, raznih oznaka, mernih površina itd.
- Mogućnost pregleda završenih radova na računaru.
Antena
Kvaliteta signala i, shodno tome, tačnost rada ovisi o anteni. Važno je shvatiti da "nevjerovatan" navigator sa ugrađenom antenom, koji vam se nudi na popustu, neće biti 99% tačan, stoga nemojte štedjeti i kupovati sisteme čija greška ne prelazi 0,5 metara. U takvim uređajima greška na liniji neće biti veća od 15-20 cm.
Cijena
Važan parametar koji je, nažalost, najbolje istražiti sami. Navigator mora imati visoke kvalitete i pristupačnu (po mogućnosti ne prenapuhanu) cijenu, pa preporučujemo da pažljivo proučite tržište i sami donesete odgovarajuće zaključke.
Mali rezime
Općenito, ako uporedite rezultate obrade polja sa i bez navigatora, možete jasno vidjeti uštede u novcu. Tipično, prilikom obrade polja na standardan način Prema vanjskim orijentirima, oko 5% usjeva je propušteno. Istovremeno, oko 10% je predmet dvostruke obrade. One. neobrađeni usjevi na kraju umiru, ali ponovljeni tretman može pokvariti dio usjeva (ovisno o vrsti tvari) ili dovesti do prekomjerne potrošnje gnojiva.
Svaki kompetentan poljoprivrednik će vam reći da kupovina skupe opreme nije isplativa ako je vozite nasumično, pa vam preporučujemo korištenje GPS navigacije na poljima i uživanje u pogodnostima koje proizlaze u vidu uštede goriva i potrošnje goriva, kao i optimizacije kretanja vozila. traktor unutar polja ili s jednog polja na drugo.
O prednostima paralelne vožnje
Pogledajmo bliže kako, gdje i kako efikasno koristiti sistemi paralelne vožnje. Glavni zadatak upotrebe je izuzetno jednostavan - omogućavaju da traktor sa montiranom jedinicom prođe preko polja tako da svaka naredna traka bude tačno uz ivicu prethodne, izbjegavajući praznine i preklapanja. Glatkim kretanjem po terenu uštedite značajan novac.
Svaki traktorista, čak i najiskusniji, neće moći da radi bez greške. A greška svakog rukovaoca mašinama je ili neobrađena ili dva puta obrađena zemlja. U prvom slučaju, korov će rasti i zgnječiti susjedne redove, smanjujući kvalitetu usjeva. U drugom: radi se o neopravdanoj prekomjernoj potrošnji sjemenskog materijala i gnojiva.
U stvarnosti, slika obrade polja izgleda ovako:
Kako osigurati ravnomjeran put kretanja po polju za vaš traktor?- verujte rukovaocu mašine i njegovom oštrom oku;
- unajmite signalista i pošaljite ga da trči po terenu i postavi oznake da usmjerava operatera;
- koristite markere od pjene;
- koristiti sisteme paralelne vožnje zasnovane na prijemnim koordinatama satelitski sistemi GLONASS/GPS.
1. Vještina rukovaoca mašinom.
Svaka farma ima odlične vozače traktora. Pouzdani, nepijani, pravi profesionalci. Prvo, takvi ljudi su prije izuzetak nego pravilo. Drugo, niko nije poništio ozloglašeni „ljudski faktor“. Problemi kod kuće, loše raspoloženje, ne vide, ne primećuju, rasejaju se. Niko nije otkazao vremenske uslove, niko nije otkazao rad samo tokom dana.
2. Angažovanje signalista.
Naravno, signalisti će operateru mašine olakšati posao, jer će imati pravac kretanja. Istovremeno, potrebno je pronaći i platiti signaliste, osim toga, problem rada u uslovima loše vidljivosti nije riješen, plus, opet, postoji velika vjerovatnoća greške vozača traktora povezane sa istim „ljudskim faktor”.
3. Upotreba pjenastih markera.
Prilično visoka preciznost, vjerovatnoća greške je značajno smanjena. Glavni nedostatak je nestabilnost markera na takve prirodne pojave kao što su vjetar i kiša. Mnogi farmeri također primjećuju činjenicu da u vrućem vremenu pjenasti materijal vrlo brzo gubi svoje kvalitete i marker postaje gotovo nevidljiv. Pitanje rada u uslovima loše vidljivosti ostaje neriješeno. Također, ne zaboravite na visoku cijenu markera od pjene.
4. Upotreba sistema paralelne vožnje.
Upotreba plovidbe u poljoprivredi nikoga neće iznenaditi. Gotovo svaki farmer u svom arsenalu ima sisteme paralelne vožnje i nikada se neće vratiti na prethodna tri metoda. Zašto?
- sposobnost rada pri slaboj vidljivosti (noću, po magli, prašini);
- omogućava vam da potpuno napustite signalizatore i upotrebu markera;
- smanjuje potrošnju sjemenskog materijala, goriva i mineralnih gnojiva;
- skraćuje se vrijeme završetka radova;
- smanjuje se zamor i povećava se radna efikasnost operatera;
- sposobnost izračunavanja površina.
Sve ovo će omogućiti:
- smanjiti preklapanja do 10%, čime se izbjegava prekomjerna potrošnja sjemenskog materijala, goriva i maziva i mineralnih gnojiva.
- povećati produktivnost smjena za 20%
- povećati radno vrijeme za 100% radom noću
Kako funkcioniše sistem paralelne vožnje
Sistem paralelne vožnje zasniva se na prijemu signala sa GPS/GLONASS satelita. Glavne oblasti primene su: obrada zemlje, setva žitarica i međurednih useva, međuredna obrada, prskanje i rasipanje đubriva za preciznu orijentaciju mašine tokom radnog hoda.

kako ovo funkcionira:
- Postavlja se na traktor (potreban vam je samo upaljač) i spojena je antena. Za stabilan rad mora se dovesti na krov;
- Navigator prima podatke sa satelita, kao i diferencirane korekcije sa baznih stanica;
- Rukovalac mašine, na ivici polja, označava tačku A, prolazi kolotečinu, označava tačku B. Pokazivač pravca postavlja paralelne linije prema datoj putanji;
- U slučaju greške rukovaoca mašine (preklapanje), diodna skala navigatora se pomera prema grešci, a preklapanje se šrafira na ekranu;
- Nakon obavljenog posla, agronom može uvjeriti se u kvalitet rada učitavanjem podataka na računar.
Načini obrade na terenu:

- 1 - "Standard mode" kretanje se dešava paralelno sa osnovnom pravom linijom AB;
- 2 - “Prilagodljiva kriva”: svaka naredna vožnja ponavlja prethodnu;
- 3 - “Identična kriva” - sve naredne vožnje ponavljaju početnu krivu AB;
- 4 - Preliminarna obrada zona okretanja duž konture polja (ovo je linija 1-2, vidi sliku), nakon čega slijedi obrada polja sa ogradama paralelnim sa osnovnom linijom (ovo je linija 3-4, vidi sliku).
U poljoprivredi su postale rasprostranjene i dokazale svoju efikasnost tri klase uređaja za upravljanje kretanjem traktora i kombajna pomoću GPS prijemnika: sistemi paralelne vožnje i potisnici za autopilota.
Upotreba svemirskih navigacijskih sustava postaje moguća nakon ugradnje posebnog prijemnika na vozilo, koji stalno prima signale o lokaciji navigacijskih satelita i udaljenosti do njih. Ovisno o traženoj preciznosti, takvom opremom upravlja rukovatelj ručno prema indikacijama oznake na ekranu, ili pomoću potisnika ili autopilota.
Sistem paralelne vožnje je najvizuelniji i najbrže isplativi deo tehnologije za preciznu poljoprivredu, dizajniran je za rad u polju i najefikasniji je kada se koristi sa opremom za široki rez.
Sistem paralelne vožnje- Ovo aktivno učešće rukovaoca u upravljanju mašinom po šemi „merenje trenutnih koordinata poljoprivredne mašine - prikazivanje odstupanja od zadate rute na displeju u kabini - okretanje volana od strane rukovaoca kako bi se jedinica zadržala na zadatoj ruti. ”
Nažalost, psihomotorna reakcija prosečnog čoveka ne dozvoljava paralelnu vožnju sa odstupanjima manjim od ±30 cm, što takođe odgovara preciznosti GPS prijemnika koji se oslanja samo na uobičajena 24 satelita. Generalno, najviše jednostavan sistem Paralelna vožnja se sastoji od GPS prijemnika sa vanjskom antenom i pokazivača smjera. Sistemi se lako i brzo ugrađuju na traktor ili kombajn. Sve što trebate je priključak za struju i instalacija vanjske jedinice (GPS prijemnika). Obuka rukovaoca mašina za rad sa ovom vrstom opreme, u zavisnosti od željene „dubine“ učenja, kreće se od nekoliko minuta do jednog dana.
Treba napomenuti da je upotreba uređaja za paralelnu vožnju s preciznošću vođenja jedinice od ±30 cm vrlo ograničena i koristi se uglavnom samo za primjenu gnojiva. Za obavljanje obrade tla, sjetve, zaštite bilja, žetve i niza drugih operacija potrebna je veća preciznost uređaja. Oprema za preciznije sisteme paralelne vožnje uključuje:
Navigacijski prijemnik sa preciznošću pozicioniranja do 10 cm, sposoban za rad na dvije frekvencije;
- displej ili LED panel;
Kontroler za izračunavanje odstupanja na nepravilnostima u prijemnoj anteni i podešavanje pravca kretanja;
Potisni uređaj.
Postoji nekoliko uobičajenih načina za podešavanje satelitskih navigacijskih signala za postizanje visoke preciznosti. Korekcije se mogu dobiti kako sa geostacionarnih satelita, što će povećati tačnost na ±10 cm, tako i sa bazne stanice RTK satelita, koja se nalazi u neposrednoj blizini terena.
Princip i sistemi automatske vožnje (autopilot).
Autopilotiranje se razlikuje od paralelne vožnje po tome što se odstupanja od date putanje koju generišu GPS prijemnik i navigacioni kontroler unose direktno u hidraulički upravljački sistem šasije traktora preko posebnih uređaja (kontrolnog ventila), eliminišući inerciju i zračnost upravljanja. Osim toga, na traktor je ugrađen poseban senzor kuta kotača. Ovaj sistem osigurava maksimalnu preciznost (odstupanje ± 2 cm) kretanja duž rute bez intervencije operatera.
Glavna prednost upotrebe sistema paralelne vožnje je smanjenje grešaka (minimiziranje ljudskog faktora) prilikom obrade polja. Praksa pokazuje da kada prskaju usjeve na tradicionalan način, većina operatera radije prolazi kroz susjedne redove s preklapanjem kako bi izbjegli praznine. Kao rezultat toga, međusobno preklapanje redova, čak i uz korištenje pjenastih markera, iznosi najmanje 5%. Upotreba indikatora smjera s potisnicima smanjuje preklapanje na 2...3% ili manje.
Prijemnik podržava različite opcije za GPS korekcije, uključujući WAAD, OmniSTAR. Upotreba ovih korekcija omogućava preciznost prolaza do ±10 cm.
Panel grafički prikazuje trenutnu poziciju vozila i pruža vozaču dodatne informacije prilikom polukružno skretanja ili vožnje u krivim trakama. Ona ima grafički prikaz sa mogućnošću čitanja podataka na jakom suncu.
Terenski kompjuter sa softverom - terenskim sistemom za upravljanje podacima koji se koristi za navigaciju, automatsku vožnju, snimanje, premjeravanje terena, mjerenje površine, aplikacije sa varijabilnim indikatorima.
kontrolor, koristeći podatke GPS prijemnika i internih senzora koji miruju i rade na 6 osa, prenosi komande upravljačkom sistemu.
Senzor ugla kotača dizajniran za kontinuirano povratne informacije sa sistemom upravljanja traktorom.
Hidraulični ventil prima električne signale od kontrolera i pretvara ih u hidraulične signale, koje sistem koristi da zadrži vozilo na zadatom kursu.
Thruster omogućava paralelnu vožnju sa preciznošću od 10 cm.
Bazna stanica prenosi GPS korekcije položaja na GPS prijemnik traktora putem radija ili GSM modema za određivanje koordinata sa velikom preciznošću (greška manja od ±2 cm).
Postoje moguće opcije za raspoređivanje opreme na traktoru za paralelnu vožnju i autopilotiranje.
Minimalni set za paralelnu vožnju sa tačnošću od ±30 cm uključuje glavne komponente: LED panel, antenu, podlogu za montažu antene, postolje, set kablova za povezivanje, softver i uputstva za upotrebu.
Ova oprema je tražena zbog činjenice da omogućava uštedu. Na primjer, u Evropi, ekonomski efekat upotrebe GPS opreme u poljoprivredi dostiže 50...60 eura po hektaru.
Inače, konvencionalna satelitska navigacija, koja se široko koristi u cestovnom transportu, može pružiti maksimalnu preciznost od samo oko 2 m, što je neprihvatljivo za tehnologije precizne poljoprivrede. U odnosu na navigacione sisteme, postoje koncepti apsolutne i relativne tačnosti. Apsolutna preciznost su stvarne koordinate koje se koriste za određivanje lokacije objekta, na primjer, zgrade, automobila, traktora ili kombajna. Za sisteme precizne farme možemo se ograničiti na relativnu preciznost, tj. trenutnu lokaciju objekta, na primjer, u odnosu na prvi prolaz, na trenutno vrijeme. Ovisno o korištenoj opremi, relativna preciznost treba da dostigne vrijednosti od 2,5...30 cm.
Trenutno postoji nekoliko korektivnih službi širom svijeta, ali Ruska Federacija Samo jedan radi - Omnistar HP/XP. Usluga funkcioniše na sledeći način: Omnistar ima sopstvenu mrežu baznih stanica koje se nalaze širom sveta. Oni su unutra automatski način rada izračunati potrebnu korekciju signala, a zatim prenijeti korekciju na određeni GPS prijemnik preko geostacionarnih satelita.
Pored diferencijalnih korekcija, široko se koristi RTK način rada, u kojem farma vlastita stacionarna ili prijenosna bazna stanica, a korekcije se šalju prijemnicima putem radio signala frekvencije 450 ili 900 MHz. U ovom slučaju nema potrebe za kupovinom pretplate za svaki prijemnik, postiže se prilično visoka relativna tačnost pozicioniranja, ali su, s druge strane, potrebni značajni jednokratni troškovi za kupovinu i instalaciju opreme. Osim toga, postoji ograničenje u području pokrivenosti zbog karakteristika signala. Dakle, za stacionarnu baznu stanicu ovo ograničenje je krug s radijusom od 11 km, u čijem se središtu nalazi bazna stanica, za prijenosnu - malo manje. U inostranstvu, nekoliko farmi kombinuju svoje RTK da bi smanjile ukupne troškove i potpunije pokrile polja, dok se signal može i preprodati.
Pošto tačnost vožnje direktno zavisi od tačnosti merenja GPS prijemnika, veoma je važno da operateri mašina poznaju osnovne principe rada prijemnika. Na tačnost određivanja lokacije utiče nekoliko glavnih faktora: vremenska neslaganja, broj istovremeno posmatranih satelita, atmosferske smetnje, varijacije u satelitskim orbitama, širenje višestaznog signala itd.
Sistemi paralelne vožnje i autopilota pomažu u preciznom održavanju udaljenosti između prolaza strojeva prilikom izvođenja radova na terenu. Prilikom njihovog korištenja tehnološke operacije se izvode uz minimalno preklapanje, štedeći radno i strojno vrijeme, gorivo i maziva, sjeme, gnojiva i sredstva za zaštitu bilja. Navigacija je veoma zgodna za prskanje, što je najbolje uraditi noću kada je temperatura vazduha niža i nema vetra. Dakle, prednosti sistema paralelne vožnje su:
Preciznost kretanja jedinica duž razmaka redova;
Smanjenje opterećenja vozača traktora (vozača);
Mogućnost rada u mraku i u uslovima loše vidljivosti.
U tu svrhu sistemi paralelne vožnje imaju poseban interfejs koji uvelike olakšava rad.
Kretanje se može izvoditi i duž pravolinijskih i zakrivljenih putanja, međutim, točnost navođenja, posebno pri radu s vučenim jedinicama, veća je pri kretanju duž ravnih linija.
V. I. Balabanov, A. I. Belenkov, E. V. Berezovski, V. V. Jegorov, S. V. Železova
Priručnik: "Navigacijske tehnologije u poljoprivredi."
Polja Trans-Urala br. 7 (129) AVGUST 2015
Trenutna stranica: 2 (knjiga ima ukupno 7 stranica) [dostupan odlomak za čitanje: 2 stranice]
Strana i domaća iskustva pokazuju visoku efikasnost tehnologija precizne poljoprivredne proizvodnje, posebno kada se primjenjuju na velikim farmama. Na primjer, prema dostupnim statistikama, već 2006. godine više od 80% poljoprivrednika u SAD-u koristilo je tehnologije precizne poljoprivrede u ovom ili onom stepenu, zahvaljujući kojima su uspjeli povećati prinose zrna na 90 c/ha. Istovremeno je utvrđeno da se troškovi uvođenja precizne poljoprivrede isplate nakon 2...4 godine njenog korišćenja i počinju da donose značajne profite.
Trenutno, precizna poljoprivreda postaje sve raširenija u mnogim zemljama, uključujući i Rusiju. Istovremeno, istraživanja u oblasti precizne poljoprivrede u proteklih 15 godina pokazala su da je ova oblast multidisciplinarna. Njegov razvoj i široko uvođenje u proizvodnju zahtijevat će mnogo više vremena i finansijskih sredstava nego korištenje tradicionalnih tehnologija.
Test pitanja i zadaci
1. Kada i gdje je nastao koncept „precizne poljoprivrede“?
2. Na kojim poljoprivrednim mašinama i koje marke su prvi put korišteni elektronski sistemi?
3. Koji su radovi u oblasti precizne poljoprivrede obavljeni u Sovjetskom Savezu i drugim socijalističkim zemljama?
4. Kada i gdje su se pojavile prve precizne sjetvene mašine?
5. Koja kompanija je prva postavila navigacijsku opremu na svoju opremu?
6. U kojim zemljama su tehnologije precizne poljoprivrede trenutno najrazvijenije?
3. Sistemi paralelne i automatske vožnje
U poljoprivredi su postale rasprostranjene i dokazale svoju efikasnost tri klase uređaja za upravljanje kretanjem traktora i kombajna pomoću GPS prijemnika: sistemi paralelne vožnje i potisnici za autopilota. Upotreba svemirskih navigacijskih sustava postaje moguća nakon ugradnje posebnog prijemnika na vozilo, koji stalno prima signale o lokaciji navigacijskih satelita i udaljenosti do njih. Ovisno o traženoj preciznosti, takvom opremom upravlja rukovatelj ručno prema indikacijama oznake na ekranu, ili pomoću potisnika ili autopilota.
Sistem paralelne vožnje je najvizuelniji i najbrže isplativi deo tehnologije za preciznu poljoprivredu, dizajniran je za rad u polju i najefikasniji je kada se koristi sa opremom za široki rez.
Sistem paralelne vožnje- ovo je aktivno učešće rukovaoca u upravljanju mašinom po šemi „merenje trenutnih koordinata poljoprivredne mašine - prikazivanje odstupanja od zadate rute na displeju u kabini - okretanje upravljača od strane rukovaoca da zadrži jedinica na datoj ruti” (slika 3).
Rice. 3. Princip rada uređaja
Nažalost, psihomotorna reakcija prosečnog čoveka ne dozvoljava paralelnu vožnju sa odstupanjima manjim od ±30 cm, što takođe odgovara preciznosti GPS prijemnika koji se oslanja samo na uobičajena 24 satelita. Općenito, najjednostavniji sistem paralelne vožnje sastoji se od GPS prijemnika sa vanjskom antenom i pokazivača smjera. Sistemi se lako i brzo ugrađuju na traktor ili kombajn. Sve što trebate je priključak za struju i instalacija vanjske jedinice (GPS prijemnika). Obuka rukovaoca mašina za rad sa ovom vrstom opreme, u zavisnosti od željene „dubine“ učenja, kreće se od nekoliko minuta do jednog dana.
Treba napomenuti da je upotreba uređaja za paralelnu vožnju s preciznošću vođenja jedinice od ±30 cm vrlo ograničena i koristi se uglavnom samo za primjenu gnojiva. Za obavljanje obrade tla, sjetve, zaštite bilja, žetve i niza drugih operacija potrebna je veća preciznost uređaja. Oprema za preciznije sisteme paralelne vožnje uključuje:
navigacioni prijemnik sa tačnošću pozicioniranja do 10 cm, sposoban da radi na dve frekvencije (slika 4);
displej (sl. 5) ili LED panel (sl. 6);
kontroler za izračunavanje odstupanja na nepravilnostima u prijemnoj anteni i podešavanje pravca kretanja (slika 7);
potisnik (sl. 10).
Postoji nekoliko uobičajenih načina za podešavanje satelitskih navigacijskih signala za postizanje visoke preciznosti. Korekcije se mogu dobiti kako od geostacionarnih satelita, što će povećati tačnost na ±10 cm, tako i od bazne stanice RTK satelita (slika 10), koja se nalazi u neposrednoj blizini terena.
Princip i sistemi automatske vožnje (autopilot). Autopilotiranje se razlikuje od paralelne vožnje po tome što se odstupanja od zadate putanje koju generiše GPS prijemnik i navigacioni kontroler unose direktno u hidraulički upravljački sistem šasije traktora preko posebnih uređaja (kontrolnog ventila) (slika 9), eliminišući inerciju i zračnost upravljanja. . Osim toga, na traktor je ugrađen poseban senzor ugla kotača (slika 8). Ovaj sistem osigurava maksimalnu preciznost (odstupanje ± 2 cm) kretanja duž rute bez intervencije operatera.
Glavna prednost upotrebe sistema paralelne vožnje je smanjenje grešaka (minimiziranje ljudskog faktora) prilikom obrade polja. Praksa pokazuje da kada prskaju usjeve na tradicionalan način, većina operatera radije prolazi kroz susjedne redove s preklapanjem kako bi izbjegli praznine. Kao rezultat toga, međusobno preklapanje redova, čak i uz korištenje pjenastih markera, iznosi najmanje 5%. Upotreba indikatora smjera s potisnicima smanjuje preklapanje na 2...3% ili manje.

Rice. 4. AgGPS 252 prijemnik
Prijemnik podržava različite opcije za GPS korekcije, uključujući WAAD, OmniSTAR. Upotreba ovih korekcija omogućava preciznost prolaza do ±10 cm.

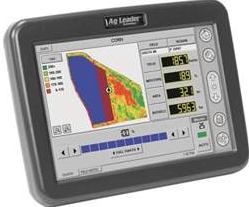
Rice. 5. AgGPS LED panel EZ-GUIDE PLUS ili EZ-GUIDE 500
Panel grafički prikazuje trenutnu poziciju vozila i pruža vozaču dodatne informacije prilikom okretanja ili vožnje u krivim trakama. Ima grafički displej sa mogućnošću čitanja podataka na jakom suncu.
Rice. 6. Insight terenski računar sa softverom
Terenski računar sa softverom - sistem za upravljanje terenskim podacima koji se koriste za navigaciju, automatsku vožnju, snimanje, premjeravanje terena, premjeravanje područja, aplikacije sa varijabilnim indikatorima.

Rice. 7. AgGPS NAVCONTROLLER II kontroler
Kontroler, koristeći podatke GPS prijemnika i internih senzora koji miruju i rade na 6 osa, prenosi komande kontrolnom sistemu.

Rice. 8 – Senzor ugla kotača
Senzor ugla kotača je dizajniran da pruži kontinuiranu povratnu informaciju sistemu upravljanja traktora.
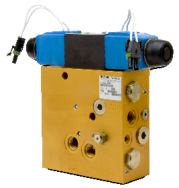
Rice. 9 – Kontrolni ventil
Hidraulički ventil prima električne signale od kontrolera i pretvara ih u hidraulične signale, koje sistem koristi da zadrži vozilo na datom kursu.
Rice. 10 – potisnik
Potisni mehanizam osigurava paralelnu vožnju s preciznošću od 10 cm.
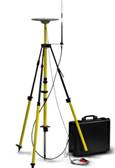
Rice. 11 – Bazna stanica (RTK)
Bazna stanica prenosi GPS korekcije položaja na GPS prijemnik traktora putem radija ili GSM modema radi određivanja koordinata sa velikom preciznošću (greška manja od ±2 cm).
Moguće opcije raspoređivanja opreme na traktoru za paralelnu vožnju i autopilotiranje prikazane su na Sl. 12.
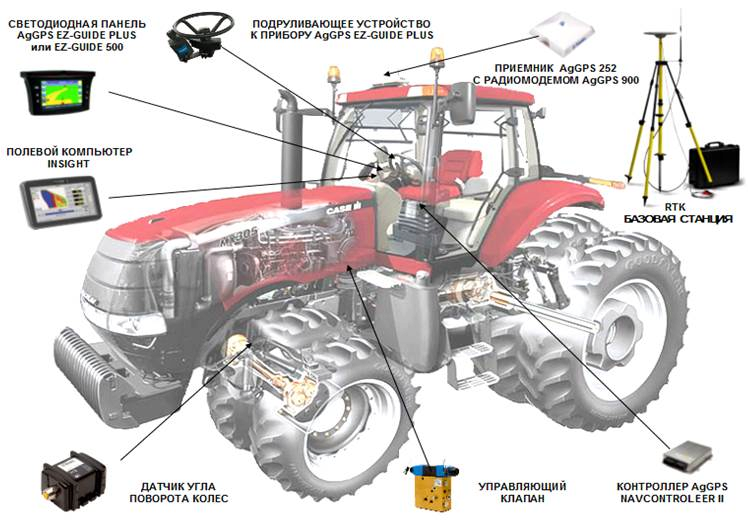
Rice. 12. Lokacija opreme za paralelnu i automatsku vožnju na traktoru (slika sa sajta http://www.trimble.com/agriculture/autopilot.aspx)
Minimalni set za paralelnu vožnju sa tačnošću od ±30 cm prikazan je na Sl. 13. Njegove glavne komponente su: LED panel, antena, podloga za montažu antene, postolje za montažu, set kablova za povezivanje, softver i uputstva za upotrebu.
Ova oprema je tražena zbog činjenice da omogućava uštedu. Na primjer, u Evropi, ekonomski efekat upotrebe GPS opreme u poljoprivredi dostiže 50...60 eura po hektaru.
Inače, konvencionalna satelitska navigacija, koja se široko koristi u cestovnom transportu, može pružiti maksimalnu preciznost od samo oko 2 m, što je neprihvatljivo za tehnologije precizne poljoprivrede. U odnosu na navigacione sisteme, postoje koncepti apsolutne i relativne tačnosti. Apsolutna preciznost su stvarne koordinate koje se koriste za određivanje lokacije objekta, na primjer, zgrade, automobila, traktora ili kombajna. Za sisteme za preciznu poljoprivredu, možemo se ograničiti na relativnu tačnost, tj. trenutnu lokaciju objekta, na primjer, u odnosu na prvi prolaz, u datom trenutku. Ovisno o korištenoj opremi, relativna preciznost treba da dostigne vrijednosti od 2,5...30 cm.
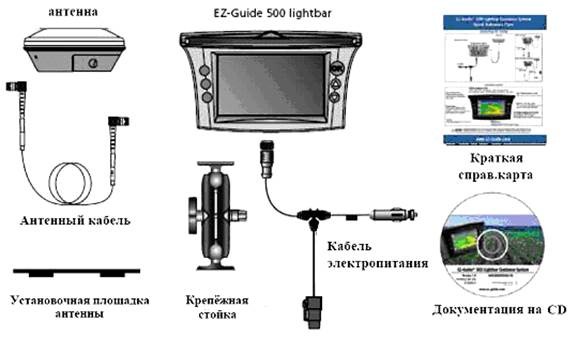
Rice. 13. Standardne komponente sistema
Trenutno u svijetu djeluje nekoliko korektivnih službi, ali samo jedna radi u Ruskoj Federaciji - Omnistar HP/XP. Usluga funkcioniše na sledeći način: Omnistar ima sopstvenu mrežu baznih stanica koje se nalaze širom sveta. Oni automatski izračunavaju potrebnu korekciju signala, a zatim prenose korekciju na određeni GPS prijemnik preko geostacionarnih satelita.
Pored diferencijalnih korekcija, široko se koristi RTK režim u kojem farma ima svoju stacionarnu ili prenosivu baznu stanicu, a korekcije se šalju prijemnicima putem radio signala frekvencije 450 ili 900 MHz. U ovom slučaju nema potrebe za kupovinom pretplate za svaki prijemnik, postiže se prilično visoka relativna tačnost pozicioniranja, ali su, s druge strane, potrebni značajni jednokratni troškovi za kupovinu i instalaciju opreme. Osim toga, postoji ograničenje u području pokrivenosti zbog karakteristika signala. Dakle, za stacionarnu baznu stanicu ovo ograničenje je krug s radijusom od 11 km, u čijem se središtu nalazi bazna stanica, za prijenosnu - malo manje. U inostranstvu, nekoliko farmi kombinuju svoje RTK da bi smanjile ukupne troškove i potpunije pokrile polja, dok se signal može i preprodati.
Pošto tačnost vožnje direktno zavisi od tačnosti merenja GPS prijemnika, veoma je važno da operateri mašina poznaju osnovne principe rada prijemnika. Na tačnost određivanja lokacije utiče nekoliko glavnih faktora: vremenska neslaganja, broj istovremeno posmatranih satelita, atmosferske smetnje, varijacije u satelitskim orbitama, širenje višestaznog signala itd.
Sistemi paralelne vožnje i autopilota pomažu u preciznom održavanju udaljenosti između prolaza strojeva prilikom izvođenja radova na terenu. Prilikom njihovog korištenja tehnološke operacije se izvode uz minimalno preklapanje, štedeći radno i strojno vrijeme, gorivo i maziva, sjeme, gnojiva i sredstva za zaštitu bilja. Navigacija je veoma zgodna za prskanje, što je najbolje uraditi noću kada je temperatura vazduha niža i nema vetra. Dakle, prednosti sistema paralelne vožnje su:
tačnost kretanja jedinica duž razmaka redova;
smanjenje opterećenja vozača traktora (vozača);
Mogućnost rada u mraku i u uslovima loše vidljivosti.
U tu svrhu sistemi paralelne vožnje (slika 14) imaju poseban interfejs koji uvelike olakšava rad.
Kretanje se može izvoditi i po ravnim i zakrivljenim putanjama (slika 15), međutim, tačnost vođenja, posebno pri radu s vučenim jedinicama, veća je pri kretanju po ravnim linijama.

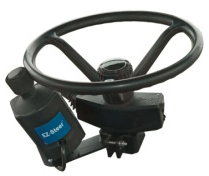
Rice. 14. Navigacijski uređaj EZ-Guide 500 Lightbar za sistem autopilota u radu

Rice. 15. Moguće putanje kretanja jedinica (crtanje sa stranice http://www.geomir.ru/ag_navigation_ru)
Testiranja navigacionog sistema u Rusiji, koje je sproveo Geomir centar 2004. godine u prostorijama kompanije Inteko-Agro LLC u Belgorodskoj oblasti, pokazala su da instaliranje sistema na nepripremljeni traktor John Deere traje oko 10 minuta.
Tim od 12 rukovaoca mašina, koji do sada nisu radili sa sistemom paralelne vožnje, obradio je polje Horsch kultivatorom (18,3 m) u dva prolaza dužine oko 800 m, dok je greška u razmaku između redova bila 25 cm. Korištena je VBS satelitska korekcija Omnistar. Sistemi paralelne vožnje i autopiloti imaju jednu karakteristiku. „Srce“ ovih sistema – GPS prijemnik – je vrsta senzora, čiji uvoz i prodaju u Rusiji strogo kontroliše država. Stoga je njihova legalna prodaja moguća tek nakon certifikacije i licenciranja. Za veći broj sistema ovi postupci su već sprovedeni i odobreni su za prodaju.
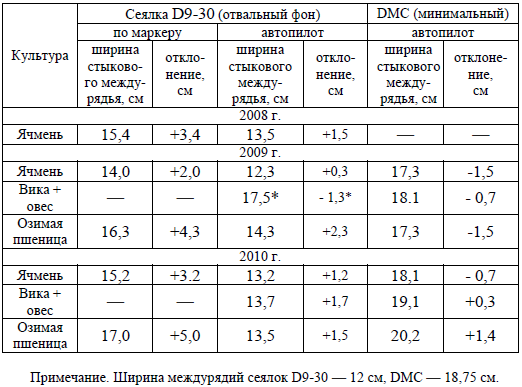
U tabeli Na slici 1 prikazani su podaci iz trogodišnjeg istraživanja veličine međuprostora pri setvi različitih useva pomoću markera i pomoću sistema Autopilot (Sl. 16, 17) na Ruskom državnom agrarnom univerzitetu - Moskovskoj poljoprivrednoj akademiji po K. A. Timirjazevu.
Tabela 1. Vrijednosti međurednog razmaka i odstupanja od standardnog međurednog razmaka sejalice

Rice. 16. Prikaz međurednog razmaka kod sjetve uz marker

Rice. 17. Prikaz međurednog razmaka pri sjetvi autopilotom
Sjetva žitarica (ozime pšenice i ječma) je u jednom slučaju obavljena autopilotom, au drugom markerom. U ovom slučaju, sjetva ozime pšenice i ječma na podlogu od daske obavljena je običnom sijačicom D9-30 Amazone (u daljem tekstu D-9-30) uz korištenje sistema Autopilot i markera. Prema opcijama nulte (bez obrade tla) i minimalne obrade tla, sjetva je obavljena pneumatskom direktnom sjetvom DMC Primera-3000 Amazone, (u daljem tekstu DMC) samo uz korištenje autopilota. Sjetva mješavine grahorice i zobi obavljena je sa dvije sijačice: D9-30 za oranje, DMC za nultu opciju samo uz upotrebu autopilota.
Tokom istraživanja uočene su nejednake širine međurednog razmaka između susjednih prolaza sijačica pri sjetvi žitarica i mješavine grahorice i ovsa korištenjem markera i autopilota. Tako je 2008. godine korištena sijačica D9-30 za sjetvu ječma uz opciju obrade tla od daske. Istovremeno, dobijena su odstupanja vrijednosti međurednog razmaka od standardnog razmaka redova predviđenog dizajnom sijačice, u slučaju sjetve ječma uz marker od 3,4 cm, uz korištenje autopilota - 1,5 cm. .
I pored relativno dobrih prosječnih vrijednosti odstupanja (0,63 i 2,98 cm u prvom ponavljanju i 1,59 i 2,68 cm u drugom, respektivno), sjetva ječma markerom (Sl. 16) pokazala je veće odstupanje u parametrima međurednog razmaka. - od +13,75 cm do – 9,0 cm Ovakva razlika između redova može imati negativan uticaj, posebno kod uzgoja međurednih kultura. Prilikom korišćenja Autopilot sistema nisu uočena tako značajna odstupanja (Sl. 17). Što se tiče rada autopilota na dasci i minimalnim pozadinama, odstupanja na potonjem imaju manje vrijednosti, jer je na gušćem tlu lakše upravljati traktorom.
Neophodno je istaći još jednu bitnu prednost Autopilot sistema u odnosu na marker. Kada se radi po sistemu no-till, oznaka markera, posebno u sumrak, nije jako vidljiva. “Autopilot” vam omogućava da radite 24 sata dnevno. Sama ova okolnost može značajno povećati efikasnost rada u poljoprivredi: dva rukovaoca mašina mogu se smenjivati na jednom traktoru bez pauze 24 sata dnevno i izvršiti setvu u najkraćem i najboljem agrotehničkom roku (Sl. 18).
U 2010. godini neslaganja u širini međurednog razmaka za pojedine kulture su se manifestovala na sljedeći način. Za ozimu pšenicu, kod sjetve pomoću odvalne obrade D9-30 uz pomoć markera, razmak između susjednih prolaza sijačice je bio 5 cm, za ječam – 3,2 cm . Za grahoricu sa ovasom ova vrijednost je bila 1,7 cm. Odstupanja pri sjetvi ovih usjeva DMC sijačicom pomoću GPS sistema su bila: za ozimu pšenicu - 1,4 cm; ječam – 0,7 cm; grahorica sa ovsom -0,3 cm Uz međuredni razmak sijačice 18,8 cm, ova odstupanja su sasvim prihvatljiva.

Rice. 18. Noćni rad na Autopilot sistemu
Kod rednih usjeva, pored precizne sadnje, potrebna je i međuredna kultivacija. Stoga, kada se koriste navigacijski sistemi, potrebna je visoka preciznost vođenja jedinice.
Tokom eksperimenata pokušano je da se sistem Autopilot prilagodi međurednoj preradi krompira. Područje na padini odabrano je za krompir kako bi se otežao rad autopilota (Sl. 19). Trajektorije koje prolazi sadilica krompira učitavane su u kompjuter Autopilot sistema kao zadatak za formirač grebena (Sl. 20).
Autopilot se s lakoćom nosio sa zadacima koje bi običnom operateru mašine bilo vrlo teško izvršiti, budući da je traktor vučen niz padinu. Autopilot sistem je bio u stanju da upravlja traktorom koji se kreće gotovo bočno. Rezultat su savršeno ravni grebeni i konzistentni naredni izdanci čak i na padini (Sl. 21).

Rice. 19. Sadnja krompira na padini pomoću Autopilot sistema

Rice. 20. Formiranje grebena krompira pomoću Autopilot sistema

Rice. 21. Idealno ravne grebene i sadnice krompira (sadnja i formiranje grebena vršeno je na autopilotu)
Krompir je sađen pomoću sadilice za krompir GL-34T uz pomoć autopilota i markera (vidi sliku 19). Navedena putanja agregata, korišćenjem GPS sistema, ponovljena je u opciji preciznog uzgoja tokom formiranja grebena rasada krompira. Prema tradicionalnoj tehnologiji uzgoja krompira, ova tehnika je izvedena vizualno, odnosno kretanje jedinice je kontrolisano od strane operatera mašine. Širina međurednog razmaka između prolaza sadilice krompira pri upotrebi markera i autopilota se neznatno razlikovala u pojedinim godinama, u proseku po tradicionalnoj tehnologiji od 60...65 do 80...85 cm, odnosno odstupanje od standarda Razmak između redova sadilice (75 cm) bio je u rasponu od – 15 do +10 cm. Korišćenjem sistema Autopilot obezbeđeno je odstupanje od ravnosti susednih redova od 2,8 do 3,0 cm (tabela 2).
Tabela 2. Širina međurednog razmaka i raspored biljaka krompira na grebenu za različite tehnologije uzgoja
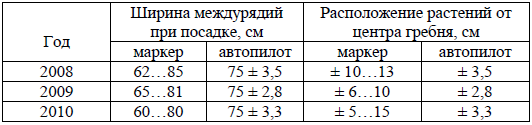
Važan uslov za razvoj punopravne biljke krompira je njegov položaj u odnosu na centralni deo grebena, nastao tokom formiranja grebena nakon nicanja. Formiranje grebena u zasadima krompira kultivisanim tradicionalnom tehnologijom obezbedilo je formiranje biljaka krompira sa odstupanjima od centra od 10 do 15 cm (Sl. 22b). To je dovelo do jednostrane promjene u rastu vegetativnog dijela, neravnomjernosti u formiranju i razvoju podzemnih gomolja, i što je najvažnije, do smanjenja kvalitete proizvoda zbog izgleda velika količina zeleni krompir.

Rice. 22. Mogući problemi kod formiranja grebena krompira (rad bez autopilota): a) sužavanje grebena; b) odstupanje od centra
Prilikom primjene tehnologije preciznog uzgoja biljke krompira su locirane u sredini reda sa odstupanjem od 2,8 do 3,5 cm Kombinacija dva prolaza agregata preko polja, odnosno sadnje i formiranja grebena krompira prikazana je u tabeli. 3.
Tabela 3. Učestalost pojavljivanja (%) odstupanja biljaka krompira od centra grebena u eksperimentu Ruskog državnog agrarnog univerziteta-Moskovska poljoprivredna akademija po K. A. Timirjazevu
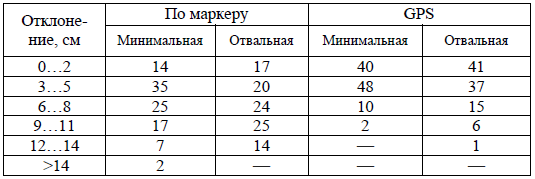
Provođenje obrade pomoću autopilota baziranog na GPS sistemu, uz korekciju signala u realnom vremenu, pokazuje visoku tačnost. Tako su pri oranju kritična odstupanja (sl. 23, oznaka L) veća od 8 cm činila 7% slučajeva, a pri minimalnoj obradi tla – 2%. Kod sadnje prema markeru i vizuelnoj formaciji grebena češće se javljaju kritična odstupanja, u 39 odnosno 26% slučajeva.
Tako se pri radu sa rednim usjevima postavljaju sljedeći zahtjevi prema sistemu GLONASS i tehničkim sredstvima automatskog MTA navođenja: navođenje jedinica u realnim terenskim uslovima, zbog preklapanja jednog prolaza na drugi, mora postići tačnost u odstupanjima od svaki prolaz ne veći od ±4 cm za radne dijelove u 95% slučajeva. Trenutno ovu tačnost obezbeđuje GPS sistem korištenjem dodatne bazne stanice.

Rice. 23. Ilustracija i dijagram formiranja grebena kod zasada krompira: L – rastojanje od biljke do centra grebena
Treba napomenuti da je pored visokopreciznog sistema za obradu satelitskih navigacionih signala neophodan i odgovarajući sistem automatskog upravljanja traktorom, jer nijedan operater ne može ručno da obezbedi potrebnu tačnost kretanja. Na primjer, kompanija John Deere već instalira sisteme tipa autopilot na svoje traktore u svojim fabrikama. Postoje i drugi sistemi upravljanja koji reaguju na odgovarajuće navigacione signale. Možete ugraditi servo pogon na upravljač traktora, koji će također automatski kontrolirati kretanje stroja. Međutim, ugradnja takvog servo pogona na serijski traktor MTZ-1221 nije bila uspješna zbog vrlo "zategnutog" upravljača (sila okretanja na volanu): elektronski sistem ovaj napor je shvatio kao pokušaj osobe da preuzme kontrolu i automatski se isključio. Sada je Fabrika traktora u Minsku počela da proizvodi traktore sa hidraulikom proizvođača Bosch (Sauer-Danfoss), a sada ih je moguće opremiti odgovarajućim sistemima upravljanja.
Trend danas je da su bez sumnje sistemi paralelne vožnje i autopiloti budućnost moderne poljoprivredne proizvodnje.
Test pitanja i zadaci
1. Koje su razlike između paralelne i automatske vožnje motornih vozila?
2. Koja oprema je potrebna za implementaciju paralelne i automatske vožnje?
3. Koja je svrha RTK stanice?
4. Koja je potrebna tačnost pozicioniranja opreme prilikom setve žitarica?
5. Šta se podrazumijeva pod apsolutnom preciznošću pozicioniranja?
6. Za koje svrhe su potrebne korektivne usluge?
Pažnja! Ovo je uvodni fragment knjige.
Ako vam se dopao početak knjige, onda puna verzija može se kupiti od našeg partnera - distributera legalnog sadržaja, doo litara.