Betaflight OSD (informazioni sullo schermo) è informazioni integrate con vari sensori in un flusso video tramite il controllore di volo. Normalmente l'OSD è una scheda aggiuntiva installata o un chip già integrato nel controllore di volo. L'OSD trasmette informazioni come voltaggio della batteria, orizzonte, altitudine e molto altro allo schermo del casco o degli occhiali.
Puoi anche utilizzare il menu OSD per modificare il PID, i filtri e altre impostazioni del quadricoptero. In questo articolo ti dirò cos'è Betaflight OSD, cosa fa e come configurarlo.
OSD Betaflight vs MinimOSD (MWOSD)
Betaflight OSD è più semplice e migliore di MinimOSD:
- Il primo è un chip già integrato nel controller di volo, non è necessario saldare o collegare nulla, mentre MinimOSD è una scheda separata alla quale bisogna saldare tutti i componenti del quadricottero, come PC, fotocamera, trasmettitore video e così via, a seconda di quali sensori utilizzerai nuovamente. Inoltre, hai bisogno di un programmatore per eseguire il flashing di questo modulo sul tuo computer.
- Vantaggi dell'OSD di Betaflight: configurazione semplice, poiché è già tutto integrato. La configurazione avviene nella GUI di Betaflight. Non è necessario saldare o eseguire il flashing di nulla, non è necessario un programmatore o un firmware del modulo di terze parti.
- L'OSD di Betaflight non occupa la porta UART poiché solitamente è collegato al BUS SPI.
Anche se ora MinimOSD è già abbastanza ben sviluppato e ha anche una shell grafica e caratteristiche simili.
Quali controllori di volo supportano l'OSD Betaflight
Non tutti i controllori di volo con OSD integrato supportano Betaflight OSD, alcuni richiedono software aggiuntivo per configurare l'OSD.
Oggi, Betaflight OSD è supportato dai seguenti velivoli: Matek F405, DYS F4 Pro, Kakute F4, Omnibus F4 e Betaflight F3.
Configurazione dell'OSD di Betaflight
Per prima cosa assicurati di averlo firmware più recente sul controllore di volo, poiché l'OSD è supportato nel firmware Betaflight V3.1 e versioni successive.
Se il tuo aereo è già dotato di chip OSD integrato, collega semplicemente la fotocamera e il trasmettitore video alle porte appropriate.
Di seguito è riportato un esempio di come collegare la fotocamera e il trasmettitore al controller di volo DYS F4 Pro FC, la fotocamera si collega a "Vin" e il trasmettitore a "Vout":
Ora connettiti al Configuratore di Betaflight, vai su Configurazione e accenderlo OSD:
Successivamente, vai alla scheda OSD per iniziare la configurazione:
Cosa potrebbe esserci di più semplice di questa interfaccia? Basta attivare e disattivare i dati che desideri visualizzare.
Formato video: seleziona PAL o NTSC, a seconda della modalità in cui si trova la tua fotocamera FPV. Se non sai in quale modalità funziona la fotocamera, impostala su AUTO, il programma la selezionerà da solo formato richiesto per il funzionamento della fotocamera.
Informazioni importanti: se lo schermo anteprima in modalità PAL o AUTO e la fotocamera è in NTSC, i dati mostrati nella parte inferiore dello schermo verranno tagliati, questa è una funzionalità di questo formato, ha una cornice più corta. Quando si utilizza il formato AUTO, è meglio posizionare i dati necessari al centro dello schermo.
Nel blocco “Allarme” è possibile configurare i valori RSSI, la capacità della batteria, il tempo pre-volo (cronometro) e l'altitudine. Non appena i dati inizieranno a corrispondere a questi numeri, inizieranno a lampeggiare sullo schermo del casco o degli occhiali.
Nella finestra di anteprima puoi trascinare i dati visualizzati come preferisci, ma non posizionarli troppo vicino ai bordi perché potrebbero essere tagliati in seguito.
- Visualizzazione della tensione della batteria
- Tempo di volo (cronometro)
- Nome (proprio))
- Valori del gas
- Quanta corrente consuma un drone?
- Quanta capacità mAh viene consumata dalla batteria?
Per attivare il menu OSD negli occhiali o nel casco, è necessaria una combinazione di movimenti con gli stick del telecomando:
- gas al centro
- imbardata (imbardata, torsione dell'asse) a sinistra
- beccheggio (beccheggio, inclinazione) in avanti
Durante l'accordatura il gas deve essere sempre al centro!
Per navigare nel menu, utilizzare levetta destra sul telecomando. Per scorrere, levetta verso l'alto o verso il basso, per selezionare una voce di menu, levetta verso sinistra/destra.
Qui puoi modificare PID, filtri, profili e così via. La maggior parte di queste impostazioni sono autoesplicative se hai già effettuato le impostazioni in Betaflight tramite la GUI della scheda OSD. Ma non tutti gli articoli sono ancora disponibili qui; alcuni sono disponibili solo nel configuratore stesso. Dopo aver effettuato le impostazioni, vai al menu principale e fai clic su " Salva*Riavvia«.
Come cambiare il carattere nell'OSD di Betaflight
Se non ti piace il carattere mostrato sullo schermo, puoi cambiarlo facilmente nel Configuratore di Betaflight, per fare ciò, vai alla scheda OSD e ci sarà un pulsante Gestione caratteri in basso:
Dopo aver selezionato un nuovo carattere, il carattere predefinito sarà ancora mostrato nella finestra di anteprima, ma avrai quello che hai scelto negli occhiali e nel casco, quindi non preoccuparti.
FAQ
Perché non riesco a vedere i dati dall'OSD nel mio casco?
Controlla se hai specificato il formato video corretto, PAL o NTSC, prova a scambiarli. Se il problema persiste, controlla il cablaggio e i giunti di saldatura dalla fotocamera e dal trasmettitore al modulo OSD.
Come posso cambiare il mio nome?
In Betaflight, scheda Configurazione, scorri verso il basso, ci sarà un campo di testo "Nome imbarcazione", puoi inserire un altro nome lì.
In questa guida esamineremo entrambe le versioni: normale e Micro, scopriremo come configurare e utilizzare il firmware MW-OSD, nonché come connettersi a Naze32 e al ricevitore.
Che cosa sono MinimOSD e Micro MinimOSD
Nonostante la configurazione sia molto più complicata rispetto ad altri OSD, come Super Simple OSD o E-OSD, che inserisci e funzionano subito, MinimOSD presenta molti vantaggi e aspetto Lo schermo è completamente personalizzabile.
Maggior parte caratteristiche utili: visualizzazione delle coordinate GPS, stili e caratteri personalizzabili, utilizzando il menu su schermo è possibile modificare coefficienti, tariffe, ecc. del controller PID. Un esempio di cosa può essere visualizzato sullo schermo.
Impostazione dei coefficienti PID tramite menu:

Dimensioni, peso, piedinatura, saldature per ridurre gli ingombri
Versione full size di MinimOSD
Questo OSD esiste da molti anni. Il vantaggio di questa versione (MinimOSD con KV Mod) è che dispone di contatti laterali per il collegamento di un sensore di corrente, RSSI, sensore di tensione, ecc. In precedenza, dovevamo saldare noi stessi con molta attenzione i fili direttamente alle gambe del chip ed era molto difficile. Questa versione ha reso la vita molto più semplice. Mi sono comprato una di queste schede (versione 2)

Dimensioni di MinimOSD con KV Mod V2: larghezza 21 mm, lunghezza: 43 mm, peso: 5,5 g (compresi i connettori).
OSD micro minimo
Sono stupito dalle dimensioni micro di questo OSD quando ha tutte le funzionalità della versione a dimensione intera. Oltre alla possibilità di alimentazione da 12V, che è vecchia versione quasi mai utilizzato causa surriscaldamento della scheda. Quindi era molto logico rimuovere questa funzionalità e ridurre le dimensioni.

La versione micro è circa 1/3 della dimensione intera in termini di peso e dimensioni.
Connettori a saldare
Saldare gli header al MinimOSD a grandezza naturale è stato facile e semplice, ma per quanto riguarda la versione micro, non mi piace il modo in cui le persone di solito li saldano

La mia creatività: devo usare connettori angolati invece di quelli dritti, quindi ne ho uno in più posto libero quando installato all'interno dell'elicottero.
Alla fine, lo imballiamo in termoretraibile per proteggere la saldatura e i fili.
Collega a Naze32, batteria, ricevitore, fotocamera, trasmettitore video
L'assemblaggio del mio elicottero è molto semplice. Qui nello schema c'è tutto ciò che dovrebbe essere collegato: Naze32, LiPo, ricevitore, fotocamera FPV e trasmettitore video.

Schema di collegamento di un normale MinimOSD con Naze32, fotocamera, ricevitore, trasmettitore video, batteria.
Come collegare la versione micro:

Domanda frequente 1. Alcune persone lamentano che il testo scompare quando si aumenta l'acceleratore. Soluzione: collegare tutta l'elettronica: fotocamera, OSD, trasmettitore video a una terra comune.
Domanda frequente 2. L'OSD non viene visualizzato, ma solo l'immagine dalla fotocamera. Soluzione: provare a modificare lo standard PAL/NTSC nelle impostazioni OSD.
Il contatto VBAT1 è collegato alla rete principale batteria al litio per mostrare la tensione. Il pin RSSI è collegato al ricevitore di controllo per visualizzare la potenza del segnale (nel caso in cui il ricevitore sia FrSky D4R-II, in modalità CPPM, quindi Pin1 è il segnale PPM, PIN2 è l'uscita RSSI).
La connessione a Naze32 tramite porta seriale (TX e RX) consentirà a Naze32 di trasmettere i dati di volo allo schermo (GPS, direzione bussola, ecc.) e l'OSD sarà in grado di modificare i coefficienti PID del controllore di volo utilizzando il telecomando .
Stai attento! La connessione al computer utilizza la stessa porta seriale, il che significa che se si desidera utilizzare il configuratore Baseflight o Cleanflight, è necessario prima disattivare TX e RX dall'OSD.
Senza connettersi a una porta seriale, MinimOSD funzionerà in modo indipendente visualizzando RSSI e tensione.
Se utilizzi Taranis in modalità PPM, leggi questo articolo: Come ottenere RSSI su un canale separato (senza cavi aggiuntivi), inglese.
Questo è quello che appare all'interno del mio mini quad.
Configurare utilizzando la GUI MW-OSD
Esistono parecchi firmware per MinimOSD, il mio preferito è Multiwii-OSD (mwosd). La versione attuale è la 1.3., il suo configuratore è molto programma conveniente. Il menu OSD è chiaro, il firmware è aggiornato e c'è il supporto per Cleanflight e Baseflight. Consente inoltre di regolare i coefficienti PID direttamente tramite il menu OSD.
Collega MinimOSD al programmatore FTDI
Per la configurazione e il firmware è necessario un adattatore FTDI. La connessione avviene tramite 5 fili: DTR (GRN), TX, RX, 5V e GND.


Configurazione di MinimOSD utilizzando la GUI MW-OSD
Attraverso l'interfaccia grafica è possibile configurare la visualizzazione di eventuali dati di volo. Perché Volo con un minicoptero, tutto ciò di cui ho bisogno è la tensione della batteria, RSSI e un timer. Sto utilizzando batterie al litio 4S e l'avviso di carica scarica è impostato su 13,6 V (3,4 V per cella, anche se dovrei impostare la soglia più alta). Per la configurazione 3S la tensione alla quale appare l'avviso può essere impostata su 11V. Sto usando FPV in formato PAL

L'unica cosa di cui devi preoccuparti è la tensione della batteria. Il valore predefinito è tutt'altro che ideale, quindi devi giocare con le impostazioni per ottenere il valore corretto. Come lo faccio:
Il valore predefinito per " regolazione tensione" = 200, e la tensione mostrata dall'OSD era 21,0 V. Ho preso un multimetro, ho misurato la tensione della batteria e ho ottenuto 11,1 V (invece di un multimetro puoi usare una sirena con voltmetro, come questa, ca. trans.)

Ora riduciamo il valore " regolare la tensione“fino a 110, ora il mio schermo OSD mostra 11,5 V. Per evitare di modificare costantemente il parametro avanti e indietro, dobbiamo calcolare il valore esatto utilizzando la matematica e le informazioni che già abbiamo 🙂 Dobbiamo calcolare quanti volt fornisce il valore 1 del parametro "regolazione tensione".
(21.0-11.5)/(200-110) = 9.5/90 = 0.1056
Sappiamo che il valore corretto sullo schermo dovrebbe essere 11,1 V, quindi il valore " regolare la tensione"dovrebbe essere:
110 - (11,5-11,1)/0,1056 = 106,21 (106 va bene)
Senso " regolare la tensione" può essere modificato non solo nel configuratore, ma anche tramite il menu su schermo, quindi non è necessario collegare MinimOSD al computer e utilizzare il configuratore.
Arduino come programmatore per MinimOSD?
Ho provato a utilizzare il mio Arduino UNO come programmatore FTDI, come ho già fatto per altri dispositivi. Sono stato in grado di modificare i parametri OSD tramite il programma GUI MW-OSD. Tuttavia, ho riscontrato un problema durante il flashing di MinimOSD, il messaggio di errore era:
avrdude: stk500_getsync(): non sincronizzato: resp=0x00.
Sembra che ci sia qualche problema con la sincronizzazione dei dati, ma mi sono assicurato di aver collegato correttamente il DTR a RESET sulla scheda Arduino, non so cos'altro posso fare, quindi ho usato il mio programmatore FTDI per flashare MinimOSD .
Menu OSD: configura PID, velocità, tensione, RSSI
Il menu OSD è la mia funzionalità preferita ed è principalmente per questo che ho abbandonato SuperSimple OSD. Esistono molti parametri che è possibile modificare senza collegarsi a un computer. Ad esempio, posso modificare i valori dei coefficienti PID direttamente sul campo utilizzando il mio telecomando, senza Bluetooth né computer! Tuttavia, non è possibile modificare separatamente i parametri di roll rate e pitch rate in Cleanflight al momento in cui sono collegati (è possibile modificarli solo entrambi contemporaneamente, trad. approssimativa). nuova versione questi parametri saranno indipendenti.
Per accedere al menu MW-OSD, devi prima disarmare l'elicottero, quindi:
- gas al centro
- imbardata (imbardata) - a destra
- beccheggio: in avanti.
Per navigare nel menù:
- Roll/pitch (pitch/roll) - per navigare nel menu
- Yaw (yaw) - per modificare i valori
- Configurazione PID (PID rollio/beccheggio/imbardata per diverse modalità di volo)
- Sintonizzazione RC (velocità RC, esposizione RC, velocità di beccheggio/rollio, velocità di imbardata, TPA (acceleratore PID Att)
- Voltaggio (mostrare o meno il voltaggio, i valori “Regola tensione”, “Allarme tensione”, “Celle”)
- RSSI (mostrare o meno)
- Corrente (mostra o meno il consumo attuale, configuralo)
- Avanzato (unità: metri/pollici, segnale: Pal o NTSC, bussola)
- Display (interruttori, acceleratore, coordinate GPS, sensori, gimbal, ecc.)
- Statistiche (distanza, altitudine massima, velocità massima, tempo di volo)
Lampeggiante
Alcuni venditori eseguono essi stessi il flashing di MinimOSD ultima versione, quindi non devi preoccuparti di lampeggiarlo. Ma forse in seguito vorrai aggiornare il firmware o provarne un altro. Per verificare la versione del firmware, accendi l'OSD sull'elicottero e guarda il messaggio sulla schermata di avvio.
Per ciascun firmware, le istruzioni descrivono in dettaglio come eseguirne il flashing. Questo è il riassunto:
- Scarica i file del firmware.
- Scarica l'IDE di Arduino
- Apri i file del firmware nell'IDE di Arduino
- Se necessario, modificare le impostazioni
- Non ho cambiato molto, solo il tipo di scheda (WitespyV1.1) e il firmware del controllore di volo (Cleanflight)
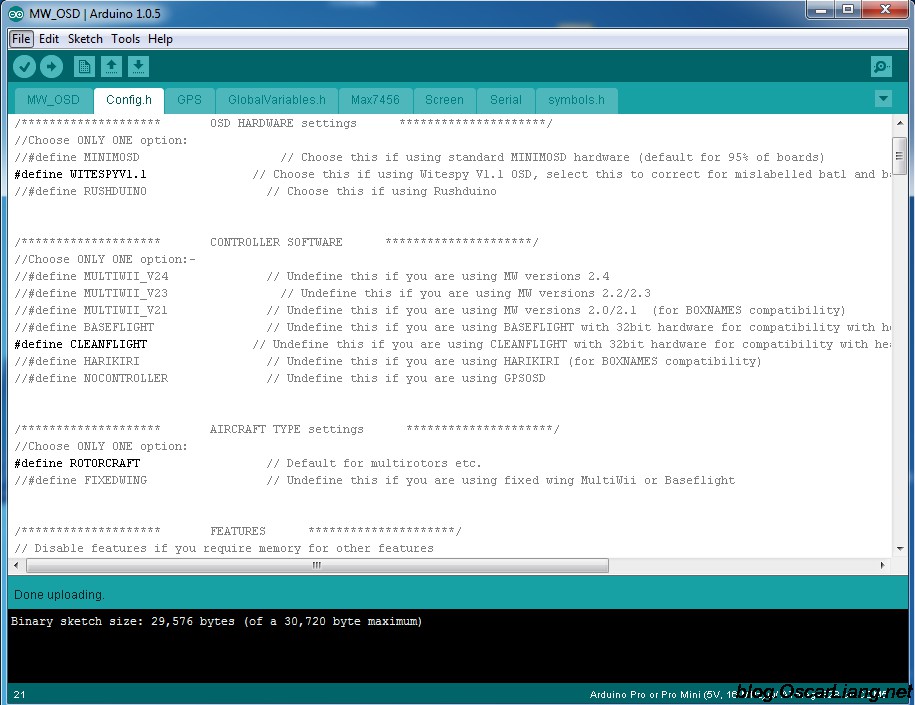
- Collegare l'adattatore FTDI (programmatore) a MinimOSD / Micro MinimOSD
- Fare clic su Compila e carica
L'OSD è un aiuto utile per i voli con telecamera. In questo articolo vedremo cos'è un OSD, come si collega alla nostra attrezzatura FPV e, infine, una panoramica delle capacità dei diversi OSD.
Se avete domande, fatemelo sapere nei commenti.
Cos'è l'OSD e quali sono i suoi vantaggi?
OSD significa On Screen Display, ovvero visualizzazione sullo schermo o menu sullo schermo (ovvero, alcune informazioni aggiuntive, principalmente testo, vengono visualizzate sopra l'immagine principale, solitamente dalla fotocamera). Nel nostro hobby l'OSD è piccolo scheda a circuito stampato, che mostra i parametri di volo sull'immagine della tua fotocamera. Ciò consente di monitorare lo stato del quadricottero direttamente durante il volo utilizzando la fotocamera.
Se disponi dei sensori e dell'OSD appropriati, puoi vedere i dati di volo direttamente negli occhiali video o sul monitor, come la tensione della batteria, la quantità di corrente assorbita dai motori e da altri dispositivi elettronici, l'altitudine, le coordinate GPS, ecc.
Ciò rende il volo con la fotocamera più sicuro perché puoi vedere il livello della batteria, sapere quando atterrare, quanto hai già volato e in quale direzione tornare.
L'OSD non è necessario per il volo della telecamera, ma come puoi vedere è estremamente utile. La maggior parte delle persone acquista almeno un SimpleOSD per vedere la tensione della batteria, questo è necessario per evitare un sovraccarico (se voli lontano, non sentirai la sirena di batteria scarica).
Tipi di dati che possono essere visualizzati utilizzando l'OSD
L'immagine mostra il set di dati più comunemente utilizzato quando si vola intorno alla fotocamera.

Timer
A seconda del tipo di OSD di cui disponi, potrebbe trattarsi del tempo di volo (contando dal momento in cui il quadricoptero decolla) o del tempo di funzionamento (a partire dal momento in cui il quadricoptero viene acceso). Alcuni OSD consentono di visualizzare più tipi di timer.
Voltaggio batteria
Quasi tutti gli OSD consentono di visualizzare la tensione. Questo è il massimo Informazioni importanti quando voli nella camera in modo da sapere quando atterrare (di solito atterro quando la tensione scende a 3,5 V per cella)
Consumo attuale
Se disponi di un sensore di corrente, puoi monitorare la quantità di corrente consumata dai motori e la quantità di mAh della batteria già utilizzata.
RSSI
RSSI è un'indicazione della potenza del segnale del trasmettitore, solitamente mostrata in percentuale. Più voli lontano, più debole sarà il segnale, questa informazione ti aiuterà a sapere a che punto dovresti tornare indietro.
RSSI è l'uscita dal ricevitore di controllo, solitamente in formato PWM, quindi potrebbero essere necessari un convertitore D/A e un filtro passa basso.
Avvertenze
Alcuni OSD possono mostrare diversi allarmi e avvisi, per questo l'utente deve impostare parametri di soglia come la tensione della batteria, il valore RSSI, ecc.
Modalità aereo
Spettacoli modalità corrente volo del tuo elicottero. Queste informazioni saranno utili se passi spesso da uno all'altro diverse modalità, come Loiter (in bilico sul posto), modalità manuale, modalità autolivellante, quindi non avrai domande su in quale modalità si trova attualmente l'elicottero. Per fare ciò, dovrai collegare il controller di volo all'OSD.
GPS
Utilizzando il GPS, ottieni non solo le coordinate del drone, ma anche la sua altitudine (anche se sarà più preciso rispetto all'utilizzo di un barometro o di un sonar). Grazie a calcoli intelligenti, possiamo vedere la velocità rispetto al suolo, la distanza dal punto di partenza e le sue coordinate ( visualizzazione grafica indicazioni verso il punto di partenza è una cosa molto utile, soprattutto se ci si perde un po').
Orizzonte
L'orizzonte virtuale ti aiuterà a capire come è inclinato il drone nello spazio.
Collegamento dell'OSD nella fotocamera, nel trasmettitore video e nel controller di volo
Dividerei tutti gli OSD in 3 tipi:
- OSD autonomo
- OSD dipendente dal controllore di volo
- Ibrido
Gli OSD autonomi si collegano solo alla fotocamera e al trasmettitore video e non comunicano con il controllore di volo. A volte possono essere collegati direttamente al GPS o ad altri sensori per avere accesso alle loro letture. Un buon esempio di questo tipo è Skylark OSD (+GPS e sensore di corrente) e Super Simple OSD.
Gli OSD dipendenti dal controller si basano solo sui dati provenienti dal controllore di volo, solitamente provenienti dalla porta seriale (RX/TX). L'OSD stesso non fa altro che visualizzare questi dati. MinimOSD con Hobbyking è un buon esempio di questo tipo di OSD (se la versione è senza modifiche, come KV mod). Il vantaggio di questo tipo è che l’OSD utilizza i dati ricevuti dai sensori del controller, il che significa che il controller stesso utilizza questi dati per semplificare la gestione e il controllo. Nel caso dell'OSD autonomo, invece, i dati provenienti dai sensori collegati all'OSD non possono essere utilizzati dal controllore di volo.
L'OSD di tipo ibrido può essere utilizzato come OSD autonomo (con funzionalità limitate) e può anche essere collegato a un controller per aumentare la gamma di dati di volo visualizzati. MinimOSD con mod KV è un ottimo esempio di questo tipo di OSD: se utilizzato come standalone, puoi vedere solo RSSI e tensione, ma quando sei collegato a un controller con GPS, vedrai la modalità di volo corrente, le coordinate GPS, l'altitudine , eccetera.
La connessione più semplice è un OSD autonomo
Ad esempio, collega Hobbyking Super Simple OSD a una fotocamera FPV, un trasmettitore video e una batteria al litio 3S.

In teoria, puoi monitorare la tensione sulla seconda batteria utilizzando la porta Bat2.
Collegamento di OSD ibridi
Noto che in questo caso l'OSD misura in modo indipendente la tensione della batteria e il livello RSSI (anche se è possibile collegarli al controller e trasmettere i dati tramite la sua porta seriale, entrambe le opzioni funzionano benissimo).
Se è necessario visualizzare le coordinate, la direzione verso il punto di partenza e la distanza da esso, è necessario connettere il GPS a Naze32.

OSD che ho già utilizzato
MinimOSD con KV Team Mod
MinimOSD è attualmente il mio OSD preferito ed è quello che utilizzo. Scaricando l'apposito firmware, MinimOSD può essere utilizzato con le schede Naze32, CC3D, Multiwii, APM e PixHawk. Questa è un'ottima scheda in grado di visualizzare assolutamente qualsiasi informazione di volo disponibile dai sensori.

MinimOSD può visualizzare qualsiasi informazione disponibile dai sensori
Hobbyking e Banggood vendono MinimOSD, ma hanno la versione originale, che non ha pin aggiuntivi sul lato per RSSI, tensione della batteria, ecc. Non mi preoccuperei di loro se ci fosse l'opportunità di acquistare MinimOSD KV Mod.
OSD minimo Micro

Esattamente lo stesso OSD descritto sopra, la differenza è la dimensione più piccola. Inoltre non ha un convertitore 12V -> 5V, ma questo non è importante, perché comunque nessuno usa questo convertitore perché la scheda si surriscalda.
BrainFPV
Questa scheda mostra anche qualsiasi cosa se si dispone dei sensori appropriati.

In questo articolo esamineremo la connessione, il firmware e la configurazione di MinimOSD. Risponderemo anche alla domanda su cosa fare se qualcosa va storto e cosa fare affinché tutto non finisca tristemente.
« Petka - dispositivi!?!? -Trecento!!! -Che trecento??? "E i dispositivi?"
OSD minimo. Sciarpa economica e molto utile. Ti permette di vedere cosa sta succedendo ora con l'elicottero: la tensione attuale, quanti ampere sono stati utilizzati, quanti satelliti di posizionamento globale sono stati catturati e ti impedisce anche di "perderti" nel cielo. Impossibile perdersi nel cielo, dici? Ma è molto possibile. A partire dall'elementare "sono decollato, oh, ma dall'alto è tutto diverso... oh, dove sono?", fino alle condizioni di volo difficili, ad esempio volare al buio o sotto una pioggia battente, o volare accidentalmente in una nuvola , come nel video qui sotto:
Al quarto minuto, solo la freccia salvavita “casa” indicava dove volare.
Ok, ok, basta con i testi, facciamo pratica!
PREPARAZIONE.
Quindi, hai ordinato MinimOSD. Su Bangood o su Hobbyking o su RCTimer, non importa dove, e abbiamo ottenuto qualcosa del genere:
Le mie mani non vedono l'ora di collegarlo alla workstation e vedere cosa mostra. Ma non è necessario farlo subito! È irto di ordinare un nuovo OSD - e questo Tempo perso(che è la cosa principale) e ovviamente ho perso soldi.
Sulla scheda sono presenti due chip di grandi dimensioni: ATMEGA328P e MAX7456. Il primo chip (microcontrollore, per essere più precisi) è responsabile della comunicazione con il controllore di volo (la “parte digitale” della scheda). E il secondo è un OSD monocromatico a canale singolo (OnScreenDisplay - menu sullo schermo) di Maxim, chiamiamolo la "parte analogica" della scheda. Quindi, questo MAX7456 è un chip piuttosto capriccioso. Non ama il surriscaldamento, non ama i salti improvvisi tra massa “digitale” e massa “analogica”, insomma brucia facilmente. E per fortuna, i pigri cinesi non saldano MAI il dissipatore di calore standard del microcircuito (sulla “pancia”). Se usi la sciarpa così com'è, la MAX brucerà: garanzia dell'80%. Per evitare che ciò accada, saldare i tre fori contrassegnati nella foto sotto.

Per fare ciò, inserire una lega sottile (1 mm di diametro, preferibilmente con flusso) nel foro e riscaldarla con un saldatore:

Ed ecco il risultato (la saldatura non è molto buona, ma come meglio posso, farai meglio!)

Ora sulle funzionalità di connessione. Gli attenti hanno notato che ho saldato il ponticello sopra. Esistono diversi modi per connettere MinimOSD e molte copie sono danneggiate, il che è migliore o più corretto o fornisce meno interferenze. Utilizzo un metodo di connessione che combina masse digitali e analogiche ed è alimentato da 5 volt dalla parte "digitale". Poiché minimOSD consuma parecchio, è meglio alimentare la scheda da una fonte di alimentazione separata. Sembra quasi così:

Cioè, ho saldato il ponticello in alto, unendo così le terre. E devi anche aggiungere un ponticello, sul lato “anteriore” del tabellone.

CONNESSIONE E IMPOSTAZIONE
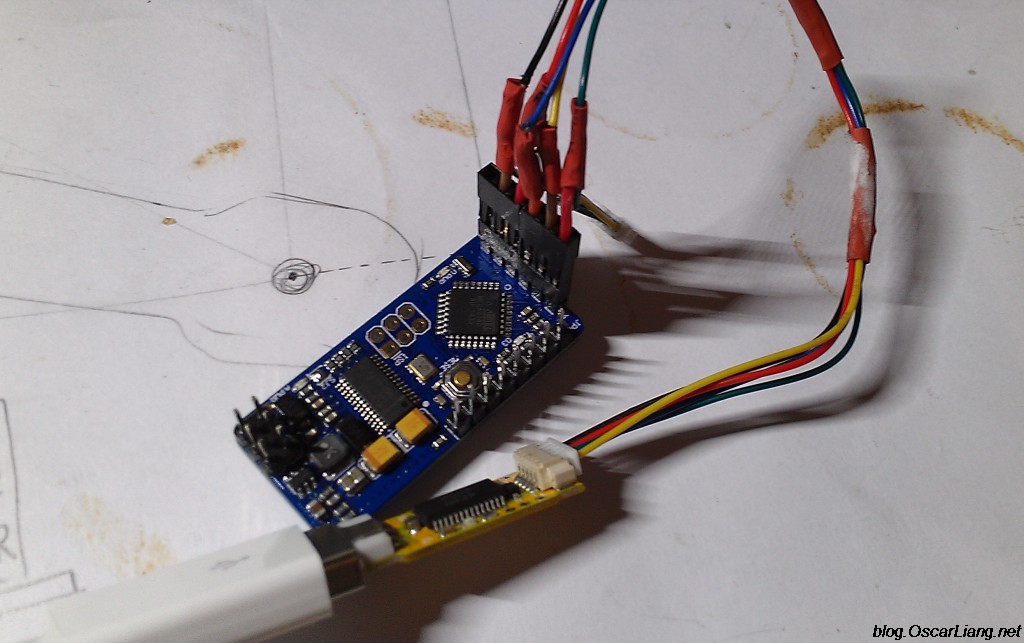
Bene, tutto è saldato, ora la nostra sciarpa è pronta per essere collegata al computer. Per fare ciò, abbiamo bisogno di un adattatore FTDI (ad esempio, o qualsiasi altro adattatore TTL USB-UART).

Ci colleghiamo utilizzando 5 fili, lo schema di collegamento è il seguente: 1. GRN, 2. Tx, 3. Rx, 4. +5V, 5. GND (dal lato OSD) - collegali all'adattatore FTDI 1. DTR, 2.Rxi, 3.Txo, 4.VCC, 5.GND. Ecco una foto di come è collegato per me:

Se non è chiaro, guarda questo video, con particolare attenzione a 1:03
Ora, cosa scaricare e come configurare. Per cominciare, dirò che il firmware è diverso per elicotteri e aeroplani. C'è anche un firmware per Multivia (kvTeam) e ci sono anche mod separate - da lavoro indipendente(senza controllore di volo), prima di collegarsi anche a Naza.
Ma qui stiamo considerando il caso “classico”: un elicottero su un controller automatizzato per postazione di lavoro. pagina ufficiale del progetto. pagina di download (per un elicottero sotto una postazione di lavoro automatizzata, è necessario scaricare ExtraCopter). Ma queste sono versioni vecchie, da allora le persone hanno apportato molte modifiche. Il firmware moderno si trova qui. Al momento in cui scrivo, questo è il firmware R800, situato (utente MinimOSD_Extra, password Top_Secret), su Ya.Disk.
L'archivio contiene il firmware stesso (file HEX), un file con i caratteri (file mcm) e il programma stesso (OSD_Config.exe).
Per prima cosa andiamo in Gestione dispositivi e controlliamo la velocità della porta FTDI (impostatela su 115200):

Lanciamo il programma OSD_Config.exe, selezioniamo la porta, premiamo il pulsante "Leggi da OSD", dovrebbe esserci un messaggio sulla lettura riuscita. Poiché non è noto quale tipo di firmware sia stato caricato dalla fabbrica, per evitare problemi in futuro, ne caricheremo uno nuovo. Per fare ciò, fare clic sul menu Opzioni>Aggiorna firmware

seleziona il file e caricalo.
Riceveremo un messaggio sul firmware riuscito

Quindi il controller inizializzerà e caricherà le impostazioni nel programma, che verranno riportate

È ora di scaricare un file con i caratteri che corrispondono al firmware (se ciò non viene fatto, l'aspetto dell'OSD potrebbe risultare molto divertente o completamente illeggibile). Fare clic sul menu Opzioni>Aggiorna set di caratteri,

seleziona il file MCM e caricalo

Stiamo aspettando la prontezza

Dopo il riempimento il regolatore viene nuovamente inizializzato.



Lasciami spiegare un po':
Canale RSSI: conversione dell'RSSI in percentuali. Dove 5 volt sono 255 (massimo nel sistema ottale). E il ricevitore FRsky ha un segnale massimo di 3,3 volt. Se selezioni la casella RSSI abilita RAW, nella schermata FPV vedremo i dati "grezzi". Questi sono quelli che possiamo inserire nelle impostazioni. Oppure puoi semplicemente inserire i miei valori.
Un'altra sottigliezza - cambiare le schermate OSD. Come noterai, ci sono due pannelli per i dati. Possiamo passare a tre opzioni di visualizzazione: schermo1 (Pannello1), schermo2 (Pannello2), schermo vuoto senza dati (Disabilitato). Per fare ciò, dobbiamo prima decidere come passare esattamente da una schermata all'altra. Ad esempio, se passiamo da una schermata all'altra utilizzando una manopola o un interruttore a levetta a tre posizioni, allora avremo tre intervalli di valori per canale (Pannello1: 0-1233, Pannello2: 1233-1467, Disabilitato: 1467- 1701). In questo caso, il pulsante di commutazione della rotazione deve essere disattivato. E se cambiamo con un semplice interruttore a levetta a due posizioni, allora ha senso abilitare la commutazione della rotazione. Allo stesso tempo, quando l'interruttore a levetta è acceso, cambieremo le schermate una per una (Pannello1 -> Pannello2 -> Disabilitato -> Pannello1 ......), non appena l'interruttore a levetta viene spento, commutando tra le schermate si fermerà. Il canale che alternerà le schermate viene determinato nell'elenco a discesa intitolato Canale di commutazione OSD. Ci ho messo il canale numero 6 e c'è un'altra imboscata che all'inizio confonde alcuni (incluso me): avviso di cambio automatico del pannello. Questo elenco determina a quale schermata passare se si verifica uno degli avvisi definiti in precedenza. Sembrerebbe che tutto sia chiaro. Stai volando, è successo qualcosa durante il volo, l'OSD è passato alla schermata che hai impostato. Ma ecco una domanda: abbiamo chiesto di passare da uno schermo all'altro, di regola questo è impostato a casa, l'elicottero non vola, vogliamo controllare: gli schermi non cambiano! Ma poiché di regola a casa non c'è alcun GPS Fix - in breve, è scattato l'avviso! Quindi passare da una schermata all'altra non funziona... :)
Non so se i restanti parametri necessitino di spiegazioni, forse li aggiungerò all'articolo più tardi.
Dirò solo che quando imposti la schermata principale, non dovresti inserire tutto lì in una volta. È meglio spegnere prima tutto (nella colonna a sinistra), e solo dopo accendere solo ciò che serve e posizionarlo immediatamente nella parte desiderata dello schermo. Consiglio di lasciare uno spazio vuoto attorno ai bordi dello schermo; può essere tagliato dal monitor o dal DVR con una penna o degli occhiali.
Poi, un altro punto importante: Impostazione dell'OSD nel Mission Planner. Supponiamo che tu abbia collegato tutto come dovrebbe, ma invece di numeri divertenti e un indicatore di atteggiamento, vediamo la noiosa scritta "No Mavlink Data". Ciò significa che l'OSD funziona, sarebbe felice di mostrarti qualcosa, ma non riceve dati. Cioè, il pin Rx non riceve alcun dato dalla workstation. Primo possibile motivo— i cavi vengono scambiati durante il collegamento. Verificare che la ricezione dell'OSD sia collegata alla porta Tx sulla workstation. La seconda ragione possibile è che il controller stesso non è configurato per inviare dati alla porta COM. Per fare ciò, in un caso semplice, nella scheda CONFIGURAZIONE INIZIALE > Hardware opzionale > OSD, è necessario fare clic sul pulsante Abilita telemetria. In questo caso, l'MP configura automaticamente una serie di parametri che consentono di inviare dati all'OSD. Se questo pulsante magico non aiuta, dovrai configurare tutto manualmente. Per fare ciò, vai alla scheda CONFIG/TUNING > Elenco completo dei parametri, scorri verso il basso fino alla lettera S e controlla (o correggi) i valori dei parametri:
- SR0_EXT_STAT = 2
- SR0_EXTRA1 = 5
- SR0_EXTRA2 = 2
- SR0_EXTRA3 = 3
- SR0_POSIZIONE = 2
- SR0_RAW_SENS = 2
- SR0_RC_CHAN = 5
Se i dati continuano a non fluire e vediamo ancora il triste messaggio “No Mavlink Data”, allora dobbiamo verificare se l'OSD è collegato alla porta giusta (l'articolo parla di UART0), forse i parametri SR1 saranno utili a te (lo stesso descritto sopra, solo per la porta UART1). È anche possibile che il tuo OSD insieme al modem di telemetria non funzioni: in questo caso potresti dover collegare o, al contrario, scollegare il cavo Tx sull'OSD. C'è anche un problema relativo al fatto che l'OSD non funziona quando il cavo USB è collegato al computer. O forse hai semplicemente invertito i fili...
Condividerò un'altra foto. Sul mio controller, la porta di telemetria principale ha smesso di funzionare a causa di un arresto anomalo, l'ho semplicemente saldata a UART0. E poi mi è piaciuta questa connessione.

Qui l'ho alimentato direttamente dal controller. Ma DEVI controllare cosa resta di 5 volt nel controller stesso. Nel mio caso, il controller stesso è alimentato dal ricevitore ed è impostato su un valore leggermente superiore a 5 volt, quindi tenendo conto del ricevitore e del minimo OSD, per l'APM stesso è rigorosamente 5 volt.
Dobbiamo toccare un altro punto. Se si esegue il flashing dell'OSD in modo errato, viene visualizzato l'errore " non è riuscito a parlare con il bootloader" Questo errore si traduce letteralmente come “errore di comunicazione con il bootloader”. Può verificarsi sia in caso di inversione dei cavi, sia in caso di distacco del caricatore. Se nel caso dei cavi tutto è chiaro (vedi sopra come collegarsi correttamente), nel caso del bootloader è necessaria una procedura per ripristinare il microcontrollore.
Ripristino del bootloader.
Per questo abbiamo bisogno almeno di un programmatore. È più conveniente utilizzare USBasp.

forse ti piacerà questo adattatore (ISP10<>ISP6)
 o questo cavo (disponibile su)
o questo cavo (disponibile su)

In generale, in un modo o nell'altro, ci colleghiamo all'ATMega328P utilizzando un programmatore.
La piedinatura del connettore ISP sulla scheda OSD corrisponde a quella generalmente accettata. Di solito il primo contatto è quadrato. In caso contrario è meglio accertarsi tracciando Vcc e GND.

I pin sono solitamente firmati sul programmatore, in caso contrario, di solito assomiglia a questo:

Per fare ciò, seleziona prima il tipo di programmatore

Quindi seleziona il tipo di scheda

E tipo di microcontrollore


e attendi circa un minuto per il caricamento del bootloader (guarda la barra di stato verde in basso)
 Fino a quando non viene visualizzato un messaggio che indica l'avvenuto flashing del bootloader
Fino a quando non viene visualizzato un messaggio che indica l'avvenuto flashing del bootloader

(non prestare attenzione agli errori seguenti, è necessario aggiornare il firmware del programmatore)
Successivamente, vai su OSD_Config.exe, carica il firmware e i caratteri, come già descritto. Potrebbe essere necessario caricare il firmware due volte (è necessario un tempo aggiuntivo per inizializzare correttamente il controller dopo aver caricato il bootloader).
Bene, sembra essere tutto. Nel caso qualcuno non lo sapesse, c'è di più. Se qualcosa non ti è chiaro qui, puoi vederlo “dal vivo” lì.
Buona fortuna con l'installazione dell'OSD sul tuo elicottero!
Sempre tuo, Ganiev Timur - 5yoda5.
5yoda5#apmcopter
Aggiornamento 11/11/2015:“Bene, è tutto saldato, ora la nostra sciarpa è pronta per essere collegata al computer. Per questo abbiamo bisogno di un adattatore FTDI (ad esempio, su un RCTimer o qualsiasi altro adattatore TTL USB-UART).
Aggiornamento 03/11/2016: aggiunte immagini pinout ISP.
Se trovi un errore nella pagina, fai clic su Maiusc + Invio o per avvisarci.
Per gli utenti dei controller APM è stato sviluppato un dispositivo speciale per la sovrapposizione dei dati di telemetria: Minim OSD. L'abbreviazione OSD deriva dall'inglese On Screen Display, che significa display Informazioni aggiuntive sullo schermo dell'operatore.
I produttori cinesi producono entrambi i controller di volo - HKPliot Mega, ArduFlyer e controller OSD - MAVLink-OSD.

Esternamente, Minim OSD non è molto diverso da MAVLink-OSD è come una copia speculare della scheda, dove il chip principale viene ruotato di 45 gradi; Inoltre, MAVLink-OSD non dispone di ponticelli per selezionare il tipo di segnale video e combinare l'alimentazione delle parti digitale e analogica.
L'OSD minimo v1.0 presentava problemi di surriscaldamento quando si utilizzava l'alimentazione della fotocamera a 12 volt. questo problemaè stato risolto nella versione v1.1.
Dato che Hong Kong ha avuto problemi con la consegna alla fine del 2013, ho ordinato MAVLink-OSD da RCTimer.

Per la programmazione avrai sicuramente bisogno di un adattatore FTDI. Pertanto, insieme a MAVLink-OSD, ho preso anche l'adattatore FTDI Tool V1.0 http://www.rctimer.com/product_684.html.

Per configurare e flashare il dispositivo, avrai bisogno di un software speciale chiamato ArduCam-OSD. Scarica l'ultima versione Software ArduCam-OSD e firmware possono essere trovati qui http://code.google.com/p/arducam-osd/downloads/list. SU questo momento Versione attuale 2.0.
Puoi anche installare firmware alternativo, il progetto si chiama minimosd-extra. Le informazioni si trovano qui https://code.google.com/p/minimosd-extra/. Per installare il firmware avrai bisogno della tua utility: MinimOSD-Extra Config Tool. Di norma, l'archivio contiene l'utilità e il firmware. Puoi scaricarlo qui https://code.google.com/p/minimosd-extra/downloads/list. Il numero di versioni è vertiginoso.
La scheda e l'adattatore erano ricoperti con pellicola termoretraibile.
Il controller ha un connettore di collegamento molto scomodo, a sei pin, senza protezione infallibile. Tutti i contatti vengono utilizzati per la programmazione, ma solo 4 contatti vengono utilizzati per la connessione al controllore di volo.
Per la programmazione basta procurarsi un cavo mini-USB.

Per quanto riguarda il connettore a quattro pin, tutto è più complicato. Se lo si mescola e lo si collega in modo errato, potrebbe fuoriuscire del fumo.
L'OSD è collegato al controllore di volo nel connettore di telemetria. Il filo dell'OSD deve essere collegato ai contatti centrali: GND, VCC, RX, TX.
Se utilizziamo un modem radio, lo colleghiamo in parallelo ad esso. Quindi ho dovuto saldare il cavo a Y.

La foto mostra il cavo per il controller AIOP, che ha anche il GPS collegato a un connettore.
Non ho rimosso il cavo che va al TX del mio OSD in modo che fosse universale, non si sa mai dove utilizzerò di nuovo questo cavo.
Da notare che se non si forniscono 5 volt alla parte analogica della scheda, la scheda rimarrà silenziosa.

Alcune risorse suggeriscono di rifare la scheda e di alimentare la parte analogica da quella digitale, ma non l'ho fatto, poiché si ritiene che possano verificarsi interferenze.
Per chi decide di collegarsi da una sola fonte di alimentazione, il circuito sarà come mostrato in foto.

Al momento la mia parte analogica è alimentata da un trasmettitore video, di cui ho già parlato nel mio precedente articolo.
Configurazione OSD ArduCAM
Cominciamo con l'utilità nativa ArduCAM OSD Config. Attualmente la versione attuale è la 2.1.2.0.
Gli elementi principali includono il menu del programma, nonché tre schede che alternano tra le seguenti schermate: Config, Pannello 1, Pannello 2.
Configurazione, qui è tutto molto chiaro.
Prima di tutto, seleziona il numero di porta e premi il pulsante Leggi da OSD.

Va notato che il tipo di segnale video NTSC - PAL è commutabile tramite il menu Programmi video Modalità. La voce di menu File consente di salvare e caricare le impostazioni o di accedere alle impostazioni predefinite. Nel menu Opzioni è possibile abilitare la modalità griglia per Panel1 e 2, aggiornare il firmware, selezionare un'immagine di sfondo, utilizzare il registro per le impostazioni e aggiungere i propri caratteri.

Il pannello 1 viene utilizzato per configurare le informazioni visualizzate nella parte superiore del video per la prima schermata. Il cambio canale è impostato su canale gratuito canale di commutazione OSD del radiocomando.

Di conseguenza, configuriamo il Pannello 2 per il secondo schermo.

Il firmware viene aggiornato utilizzando la stessa utility.

Strumento di configurazione MinimOSD-Extra
Quando apriamo il programma MinimOSD-Extra Config Tool, sembra che le cartelle siano state confuse e ArduCAM OSD Config sia stato avviato di nuovo. Questa è la prima impressione, in effetti è molto simile, ma ci sono più impostazioni.
Diamo un'occhiata alle principali differenze.
Il primo passo è selezionare il tipo di modello: Aereo, Elicottero.
Aggiunta un'opzione quando si verifica un avviso, la schermata passa automaticamente a quella specificata nel menu a discesa (Cambio pannello automatico avvisi). Ciò è necessario quando, ad esempio, tutte le informazioni vengono rimosse dal secondo schermo in modo che nulla interferisca con la visualizzazione.
La batteria può essere visualizzata in percentuale o mA.
E un altro blocco Mostra il segno prima del valore, che è responsabile della visualizzazione delle icone prima dei valori.

Prima schermata

Secondo schermo

risultati
Per prima cosa ho installato il firmware tramite ArduCAM OSD Config.

In linea di principio andava tutto bene, ma ero preoccupato per una sfumatura, che è stata espressa di seguito.
Dopo aver collegato il dispositivo, ho notato sullo schermo che alcune informazioni sulla sinistra erano tagliate. Le icone davanti ai valori dei parametri mancano per metà. Ho deciso di provare a cambiare il tipo di segnale in PAL, ma alla fine la situazione è peggiorata ulteriormente, tagliando la parte superiore e inferiore dello schermo, quindi l'ho ripristinato in NTSC. Lascia che sia solo da un lato e non da tre, soprattutto perché a sinistra puoi provare a correggere questo difetto.

Le informazioni spostate bloccano un carattere a destra.

L'operazione è stata indolore, c'era abbastanza spazio per questo.


Alla fine tutto ha funzionato, le icone ora sono completamente visibili, le informazioni sono perfettamente leggibili sullo schermo.
Ma è stato installato il firmware MinimOSD-Extra 2.4 R726, ma lo schermo ha iniziato a mostrare una sorta di disgrazia.

L'immagine è diventata illeggibile, le informazioni erano confuse su tutto lo schermo.

Ho scaricato una versione precedente 2.2.

Con questa versione del firmware, le informazioni hanno iniziato a essere visualizzate senza distorsioni.

conclusioni
Dispositivo compatto ed economico. Abbastanza versatile, può essere utilizzato con entrambi tavole originali ArduPilot Mega (APM) e i suoi cloni HKPILOT Mega, ArduFlyer, nonché i controller della serie AIO (All-In-One) con firmware MPNG o MultyWii. Ci sono informazioni sui forum sulla connessione ai controller DJI Naza, ma ciò richiede di lavorare con un saldatore tra le mani.
L'unico aspetto negativo è il connettore a sei pin sulla scheda, al quale colleghiamo un cavo con un connettore a quattro pin. Ci possono essere molte varianti; se commetti un errore puoi bruciare il tabellone, poiché non c'è protezione.
Devi anche ricordarti di alimentare le parti digitali e analogiche della scheda, altrimenti non funzionerà. Quale metodo di alimentazione scegliere sarà più conveniente per tutti.
Naturalmente, mi è piaciuto di più MinimOSD-Extra, poiché ti consente di esibirti altre impostazioni, che non sono presenti in ArduCam OSD Config. Ma come si è scoperto, dobbiamo ancora trovarlo versione stabile. Mi sono imbattuto nel fatto che con alcuni firmware l'output delle informazioni sul video viene interrotto. Non era la prima volta che riuscivo a trovare una versione funzionante. Pertanto, alcune opzioni MinimOSD-Extra non sono state disponibili per me. Sfortunatamente, questo è uno svantaggio di molti progetti open source.
Pertanto, vale la pena notare che ArduCam-OSD Config è più stabile e comprovato.
Il controller esegue una sovrapposizione di informazioni di alta qualità sul video; il testo appare abbastanza chiaro ed è facile da leggere su un piccolo schermo. Non ho notato alcun rallentamento nella visualizzazione delle informazioni.