ความก้าวหน้าและ เทคโนโลยีชั้นสูงทำให้ชีวิตของเราง่ายขึ้นอย่างมาก ในรูปแบบที่หลากหลายที่สุด เช่น ในชีวิตประจำวัน ในอุตสาหกรรมขนาดใหญ่และขนาดเล็ก และแม้แต่ในการเกษตร และถ้าการทำฟาร์มก่อนหน้านี้ดำเนินการโดยมนุษย์และสัตว์โดยเฉพาะ ในปัจจุบันนี้มีการใช้เครื่องจักรการเกษตรและอุปกรณ์ไฮเทคหลากหลายชนิดในทุกที่ โดยเฉพาะอย่างยิ่งตัวอย่างของอุปกรณ์ไฮเทคที่มีประโยชน์และไม่ต้องสงสัยเลยคือเครื่องนำทางสำหรับรถแทรกเตอร์ (ระบบขับเคลื่อนแบบขนาน) ซึ่งช่วยให้เครื่องเคลื่อนที่ไปตามเส้นทางที่กำหนดไว้
ข้อดีของการนำทางสำหรับรถแทรกเตอร์นั้นชัดเจนสำหรับทุกคนที่รู้วิธีนับเงินและชอบกระจายและประหยัดเงินอย่างชาญฉลาด ตัวอย่างเช่น อุปกรณ์นำทางช่วยให้คุณ:
- ประหยัดน้ำมันเชื้อเพลิงและน้ำมันเชื้อเพลิง
- เพิ่มประสิทธิภาพการเคลื่อนย้ายอุปกรณ์ภายในสนามและจากสนามหนึ่งไปอีกสนามหนึ่ง
- เพิ่มภาระอุปกรณ์ 2 หรือ 3 เท่า
ผลลัพธ์คือประหยัดเงินได้ชัดเจน!
ระบบขับเคลื่อนแบบขนานคือการติดตั้งหน้าจอภาพพิเศษ - ไฟแสดงทิศทาง ตัวควบคุม และตัวรับสัญญาณ GPS ระบบนี้ช่วยให้คุณจำเส้นทางที่ต้องการได้โดยการบังคับรถแทรกเตอร์ให้ขนานกับเส้นที่วางไว้ก่อนหน้านี้ ไม่ว่าคุณกำลังติดตามหรือเบี่ยงเบนไปจากเส้นทางที่กำหนดจะแสดงบนหน้าจอ
ในเวลาเดียวกัน การนำทางไม่เพียงแต่ช่วยให้สามารถประมวลผลสนามเป็นเส้นตรงเท่านั้น แต่ยังรวมถึงเส้นโค้งด้วย ซึ่งช่วยลดโอกาสที่จะเกิดช่องว่างระหว่างแถวที่อยู่ติดกัน เหล่านั้น. การเก็บเกี่ยวจะเก็บเกี่ยวได้เกือบ 100%
ตามผลงาน คนขับรถแทรกเตอร์จะได้รับรายงานฉบับเต็มที่แสดงบนหน้าจอ
ระบบนำทางสำหรับรถแทรกเตอร์มีประเภทใดบ้าง?
ปัจจุบันการนำทางสำหรับรถแทรกเตอร์มีสองประเภทหลัก - ระบบขับเคลื่อนอัตโนมัติและระบบขับเคลื่อนแบบขนาน
ระบบอัตโนมัติช่วยให้คุณสามารถลดภาระของบุคคลได้ (คนขับรถแทรกเตอร์จะหมุนอุปกรณ์ไปรอบ ๆ เท่านั้น) นอกจากนี้ ต้องขอบคุณระบบอัตโนมัติที่ทำให้สามารถทำงานได้ เช่น ในระหว่างที่ทัศนวิสัยไม่ดี (มีฝนตกเล็กน้อย หมอก และแม้กระทั่งในเวลากลางคืน) ซึ่งเพิ่มผลิตภาพแรงงานอย่างมีนัยสำคัญและช่วยให้ยานพาหนะสามารถใช้งานได้ตลอด 24 ชั่วโมง ( แน่นอนหากการออกแบบอนุญาต)
อย่างไรก็ตามระบบนำทางแต่ละระบบในตลาดมีลักษณะเฉพาะที่แตกต่างกันและเป็นการดีที่จะทราบว่าพารามิเตอร์ใดที่ควรคำนึงถึงและความแตกต่างที่ควรพิจารณาเมื่อซื้อ
จอแสดงผลคุณภาพสูง
จอแสดงผลเป็นหนึ่งในองค์ประกอบที่สำคัญที่สุดของระบบขับเคลื่อนแบบขนานซึ่งคุณภาพจะกำหนดความสะดวกในการใช้งานโดยตรง
จอแสดงผลคุณภาพสูงควรมีลักษณะดังนี้:
- สดใสและตัดกัน - ข้อมูลควรอ่านง่ายแม้ในสภาพอากาศที่มีแดดจัด หน้าจอด้านจะไม่สะท้อนแสงแดด อุปกรณ์ยังควรมีฟังก์ชันควบคุมความสว่างของแบ็คไลท์และมีโหมดกลางคืนเพื่อลดอาการปวดตาของผู้ปฏิบัติงาน
- ขนาดใหญ่และจอกว้าง ความสามารถในการมองเห็นมากขึ้น - ควบคุมการขับขี่แบบขนานได้ดีขึ้น
- ทนทานและป้องกัน ตัวเคสต้องได้รับการปกป้องจากความชื้นและฝุ่นและวัสดุที่ใช้ในเครื่องต้องมีคุณภาพสูง 100%
ฟังก์ชั่นการทำงาน
สิ่งสำคัญคือการควบคุมทั้งหมดจะต้องอยู่ในตำแหน่งที่สะดวกที่สุด เรียบง่าย และเข้าใจได้ ใส่ใจกับขนาดของปุ่ม (ใหญ่หรือเล็ก) ภาษาของเมนู ฯลฯ ระบบนำทางสำหรับรถแทรกเตอร์จะต้องปฏิบัติตามวลี "สร้างมาเพื่อผู้คน" โดยสมบูรณ์ จำเป็นต้องมีฟังก์ชันต่อไปนี้:
- การขับรถเป็นเส้นตรง ทุกอย่างชัดเจนที่นี่ - มาวาดกัน เส้น เอ-บีและอุปกรณ์จัดเรียงเส้นตรงขนานที่เหลือสำหรับการขับขี่
- โหมดการขับขี่ฟรี การเดินทางครั้งแรกบนรถแทรกเตอร์สามารถเดินไปตามทางโค้งได้ หลังจากนั้นอุปกรณ์จะแสดงข้อความแจ้งให้ขับรถต่อไปโดยคัดลอกเส้นทางที่รถเพิ่งขับไป
- ความสามารถในการ "ดำเนินการต่อ" ส่วนใด ๆ ที่บันทึกไว้ในหน่วยความจำของอุปกรณ์
- ความสามารถในการ "แก้ไขฟิลด์" ด้วยตนเองด้วยการแทรกพื้นที่ประมวลผล เครื่องหมายต่างๆ พื้นที่การวัด ฯลฯ
- ความสามารถในการดูงานที่เสร็จสมบูรณ์บนพีซี
เสาอากาศ
คุณภาพของสัญญาณและความแม่นยำของงานขึ้นอยู่กับเสาอากาศ สิ่งสำคัญคือต้องเข้าใจว่าเครื่องนำทางที่ "น่าทึ่ง" พร้อมเสาอากาศในตัวที่เสนอส่วนลดให้คุณนั้นจะไม่ถูกต้อง 99% ดังนั้นอย่าบันทึกและซื้อระบบที่มีข้อผิดพลาดไม่เกิน 0.5 เมตร ในอุปกรณ์ดังกล่าวข้อผิดพลาดในบรรทัดจะไม่เกิน 15-20 ซม.
ราคา
พารามิเตอร์สำคัญที่น่าเสียดายที่คุณควรสำรวจด้วยตัวเองดีที่สุด เครื่องนำทางต้องมี คุณภาพสูงและราคาไม่แพง (ไม่ควรสูงเกินไป) ดังนั้นเราขอแนะนำให้คุณศึกษาตลาดอย่างรอบคอบและหาข้อสรุปที่เหมาะสมด้วยตนเอง
สรุปนิดหน่อย
โดยทั่วไป หากคุณเปรียบเทียบผลลัพธ์ของฟิลด์การประมวลผลที่มีและไม่มีเนวิเกเตอร์ คุณจะเห็นการประหยัดเงินได้อย่างชัดเจน โดยปกติแล้วเมื่อประมวลผลฟิลด์ ในลักษณะมาตรฐานตามสถานที่สำคัญภายนอก พืชผลประมาณ 5% หายไป ในเวลาเดียวกันประมาณ 10% อาจมีการประมวลผลซ้ำซ้อน เหล่านั้น. พืชที่ไม่ผ่านการบำบัดจะตายในที่สุด แต่การบำบัดซ้ำอาจทำให้พืชผลบางส่วนเสียหาย (ขึ้นอยู่กับชนิดของสาร) หรือนำไปสู่การใช้ปุ๋ยมากเกินไป
เกษตรกรผู้มีความสามารถจะบอกคุณว่าการซื้ออุปกรณ์ราคาแพงจะไม่สร้างผลกำไรหากคุณขับรถอย่างไม่ได้ตั้งใจ ดังนั้นเราขอแนะนำให้ใช้ระบบนำทาง GPS ในทุ่งนาและเพลิดเพลินไปกับผลประโยชน์ที่ได้รับในรูปแบบของการประหยัดเชื้อเพลิงและการใช้เชื้อเพลิง ตลอดจนเพิ่มประสิทธิภาพการเคลื่อนที่ของ รถแทรคเตอร์ในสนามหรือจากสนามหนึ่งไปอีกสนามหนึ่ง
เกี่ยวกับข้อดีของการขับขี่แบบขนาน
เรามาดูกันดีกว่าว่าจะใช้อย่างไร ที่ไหน และมีประสิทธิภาพแค่ไหน ระบบขับเคลื่อนแบบขนาน- งานหลักในการใช้งานนั้นง่ายมาก - ทำให้รถแทรกเตอร์ที่มีชุดติดตั้งสามารถผ่านสนามได้เพื่อให้แถบที่ตามมาแต่ละแถบอยู่ตามแนวขอบของแถบก่อนหน้าทุกประการหลีกเลี่ยงช่องว่างและการทับซ้อนกัน การเคลื่อนที่อย่างราบรื่นทั่วทั้งสนามจะช่วยประหยัดเงินได้มาก
คนขับรถแทรกเตอร์แม้แต่ผู้ที่มีประสบการณ์มากที่สุดก็ไม่สามารถทำงานได้โดยไม่มีข้อผิดพลาด และความผิดพลาดของผู้ควบคุมเครื่องจักรทุกคนคือที่ดินรกร้างหรือที่ดินแปรรูปสองครั้ง ในกรณีแรก วัชพืชจะเติบโตและบดขยี้แถวที่อยู่ติดกัน ส่งผลให้คุณภาพของพืชผลลดลง ประการที่สอง: นี่เป็นการบริโภควัสดุเมล็ดพันธุ์และปุ๋ยมากเกินไปอย่างไม่ยุติธรรม
ในความเป็นจริง รูปภาพการประมวลผลภาคสนามมีลักษณะดังนี้:
จะมั่นใจได้อย่างไรว่ารถแทรกเตอร์ของคุณมีเส้นทางการเคลื่อนที่สม่ำเสมอทั่วทุ่ง?- ไว้วางใจผู้ควบคุมเครื่องจักรและสายตาที่เฉียบแหลมของเขา
- จ้างคนให้สัญญาณแล้วส่งเขาวิ่งไปรอบสนามและติดเครื่องหมายเพื่อนำทางผู้ควบคุมเครื่อง
- ใช้มาร์กเกอร์โฟม
- ใช้ระบบขับเคลื่อนแบบขนานตามพิกัดรับ ระบบดาวเทียมโกลนาส/จีพีเอส
1. ทักษะการใช้เครื่องจักร
ทุกฟาร์มมีคนขับรถแทรกเตอร์ที่ยอดเยี่ยม เชื่อถือได้ ไม่ดื่ม เป็นมืออาชีพอย่างแท้จริง ประการแรก คนเช่นนี้เป็นข้อยกเว้นมากกว่าเป็นกฎเกณฑ์ ประการที่สอง ไม่มีใครสามารถยกเลิก "ปัจจัยมนุษย์" อันโด่งดังได้ ปัญหาทางบ้าน อารมณ์ไม่ดี ไม่เห็น ไม่สังเกต ฟุ้งซ่าน ไม่มีใครยกเลิกสภาพอากาศ ไม่มีใครยกเลิกงานเฉพาะช่วงกลางวันเท่านั้น
2. จ้างคนส่งสัญญาณ
แน่นอนว่าคนให้สัญญาณจะทำให้การทำงานของผู้ควบคุมเครื่องจักรง่ายขึ้นเพราะเขาจะมีทิศทางในการเคลื่อนที่ ในเวลาเดียวกันจำเป็นต้องค้นหาและจ่ายเงินผู้ให้สัญญาณนอกจากนี้ปัญหาการทำงานในสภาพการมองเห็นที่ไม่ดียังไม่ได้รับการแก้ไขแถมยังมีโอกาสสูงที่จะเกิดข้อผิดพลาดของคนขับรถแทรกเตอร์ที่เกี่ยวข้องกับ "มนุษย์คนเดียวกัน" ปัจจัย".
3.การใช้โฟมมาร์กเกอร์
มีความแม่นยำสูง โอกาสที่จะเกิดข้อผิดพลาดลดลงอย่างมาก ข้อเสียเปรียบหลักคือความไม่แน่นอนของเครื่องหมายต่อปรากฏการณ์ทางธรรมชาติเช่นลมและฝน เกษตรกรจำนวนมากยังทราบด้วยว่าในสภาพอากาศร้อนวัสดุโฟมจะสูญเสียคุณสมบัติไปอย่างรวดเร็วและเครื่องหมายก็แทบจะมองไม่เห็น ปัญหาการทำงานในสภาพทัศนวิสัยไม่ดียังคงไม่ได้รับการแก้ไข นอกจากนี้อย่าลืมเกี่ยวกับราคาโฟมมาร์กเกอร์ที่มีราคาสูง
4.การใช้ระบบขับเคลื่อนแบบขนาน
การใช้การนำทางในการเกษตรจะไม่ทำให้ใครแปลกใจ เกษตรกรเกือบทุกคนมีระบบขับเคลื่อนแบบขนานอยู่ในคลังแสงของเขา และจะไม่กลับไปใช้สามวิธีก่อนหน้านี้อีก ทำไม
- ความสามารถในการทำงานในทัศนวิสัยไม่ดี (ตอนกลางคืน, ท่ามกลางหมอก, ฝุ่น);
- ช่วยให้คุณสามารถละทิ้งผู้ส่งสัญญาณและการใช้เครื่องหมายได้อย่างสมบูรณ์
- ลดการใช้วัสดุเมล็ดพันธุ์ เชื้อเพลิง และปุ๋ยแร่ธาตุ
- เวลาทำงานเสร็จลดลง
- ความเหนื่อยล้าลดลงและประสิทธิภาพการทำงานของผู้ปฏิบัติงานเพิ่มขึ้น
- ความสามารถในการคำนวณพื้นที่
ทั้งหมดนี้จะช่วยให้:
- ลดการทับซ้อนได้ถึง 10% ดังนั้นจึงหลีกเลี่ยงการใช้วัสดุเมล็ดพันธุ์ เชื้อเพลิงและสารหล่อลื่น และปุ๋ยแร่ธาตุมากเกินไป
- เพิ่มผลผลิตกะ 20%
- เพิ่มชั่วโมงการทำงาน 100% โดยการทำงานในเวลากลางคืน
ระบบขับเคลื่อนแบบขนานทำงานอย่างไร
ระบบขับเคลื่อนแบบขนานจะขึ้นอยู่กับการรับสัญญาณจากดาวเทียม GPS/GLONASS ขอบเขตการใช้งานหลัก ได้แก่ การเพาะปลูกดิน การหว่านเมล็ดพืชและพืชแถว การเพาะปลูกแบบแถวเรียง การฉีดพ่นและโรยปุ๋ยเพื่อให้เครื่องจักรมีทิศทางที่แม่นยำในระหว่างจังหวะการทำงาน

มันทำงานอย่างไร:
- ติดตั้งอยู่บนรถแทรกเตอร์ (สิ่งที่คุณต้องมีคือที่จุดบุหรี่) และเชื่อมต่อเสาอากาศแล้ว สำหรับ การดำเนินงานที่มั่นคงต้องนำไปไว้บนหลังคา
- เครื่องนำทางรับข้อมูลจากดาวเทียมรวมถึงการแก้ไขที่แตกต่างจากสถานีฐาน
- ผู้ควบคุมเครื่องจักรอยู่ที่ขอบสนาม ทำเครื่องหมายจุด A ผ่านร่อง ทำเครื่องหมายจุด B ตัวแสดงทิศทางจะวางเส้นคู่ขนานตามวิถีที่กำหนด
- ในกรณีที่ผู้ปฏิบัติงานเครื่องจักรเกิดข้อผิดพลาด (ทับซ้อนกัน) สเกลไดโอดของเนวิเกเตอร์จะเลื่อนไปทางข้อบกพร่อง และการทับซ้อนกันจะฟักออกมาบนหน้าจอ
- หลังจากเสร็จสิ้นงานนักปฐพีวิทยาสามารถดูคุณภาพของงานได้โดยการอัพโหลดข้อมูลลงคอมพิวเตอร์
โหมดการประมวลผลภาคสนาม:

- 1 - การเคลื่อนไหว "โหมดมาตรฐาน" เกิดขึ้นขนานกับเส้นตรงฐาน AB
- 2 - “เส้นโค้งแบบอะแดปทีฟ”: การวิ่งครั้งต่อไปแต่ละครั้งจะทำซ้ำการวิ่งก่อนหน้า
- 3 - “เส้นโค้งที่เหมือนกัน” - การวิ่งครั้งต่อไปทั้งหมดจะทำซ้ำเส้นโค้งเริ่มต้น AB;
- 4 - การประมวลผลเบื้องต้นของโซนเลี้ยวตามแนวเส้นสนาม (นี่คือเส้นที่ 1-2 ดูรูป) ตามด้วยการประมวลผลสนามโดยมีคอกม้าขนานกับเส้นฐาน (นี่คือเส้น 3-4 ดูรูป)
ในด้านการเกษตร อุปกรณ์สามประเภทสำหรับควบคุมการเคลื่อนที่ของรถแทรกเตอร์และรถผสมผสานโดยใช้เครื่องรับ GPS ได้กลายเป็นที่แพร่หลายและได้พิสูจน์ประสิทธิภาพแล้ว: ระบบขับเคลื่อนแบบขนานและเครื่องขับดันสำหรับระบบอัตโนมัติ
การใช้ระบบนำทางในอวกาศเป็นไปได้หลังจากติดตั้งเครื่องรับพิเศษบนยานพาหนะซึ่งรับสัญญาณเกี่ยวกับตำแหน่งของดาวเทียมนำทางและระยะทางอย่างต่อเนื่อง ขึ้นอยู่กับความแม่นยำที่ต้องการ อุปกรณ์ดังกล่าวจะถูกควบคุมโดยผู้ปฏิบัติงานด้วยตนเองตามเครื่องหมายบนหน้าจอแสดงผล หรือใช้ทรัสเตอร์หรือระบบอัตโนมัติ
ระบบขับเคลื่อนแบบขนานเป็นส่วนที่มองเห็นได้ชัดเจนที่สุดและจ่ายผลตอบแทนเร็วที่สุดในเทคโนโลยีการทำฟาร์มที่แม่นยำ ออกแบบมาสำหรับงานภาคสนามและมีประสิทธิภาพสูงสุดเมื่อใช้กับอุปกรณ์หน้ากว้าง
ระบบขับเคลื่อนแบบขนาน- นี้ การมีส่วนร่วมอย่างแข็งขันผู้ปฏิบัติงานในการควบคุมเครื่องจักรตามแบบ “การวัดพิกัดปัจจุบันของเครื่องจักรกลการเกษตร - การแสดงค่าเบี่ยงเบนไปจากเส้นทางที่กำหนดบนจอแสดงผลในห้องโดยสาร - การหมุนพวงมาลัยโดยผู้ควบคุมเครื่องเพื่อให้เครื่องอยู่ในเส้นทางที่กำหนด ”
น่าเสียดายที่ปฏิกิริยาทางจิตของคนทั่วไปไม่อนุญาตให้ขับรถคู่ขนานโดยมีความเบี่ยงเบนน้อยกว่า ±30 ซม. ซึ่งสอดคล้องกับความแม่นยำของเครื่องรับ GPS ที่อาศัยดาวเทียม 24 ดวงตามปกติเท่านั้น โดยทั่วไปมากที่สุด ระบบที่เรียบง่ายการขับขี่แบบขนานประกอบด้วยเครื่องรับ GPS พร้อมเสาอากาศภายนอกและไฟแสดงทิศทางที่มุ่งหน้าไป ระบบนี้ติดตั้งได้ง่ายและรวดเร็วบนรถแทรกเตอร์หรือรถผสม สิ่งที่คุณต้องมีคือการเชื่อมต่อสายไฟและการติดตั้งหน่วยภายนอก (ตัวรับสัญญาณ GPS) การฝึกอบรมผู้ควบคุมเครื่องจักรให้ทำงานกับอุปกรณ์ประเภทนี้ ขึ้นอยู่กับ "ความลึก" ของการศึกษาที่ต้องการ โดยมีตั้งแต่หลายนาทีไปจนถึงหนึ่งวัน
ควรสังเกตว่าการใช้อุปกรณ์ขับเคลื่อนแบบขนานที่มีความแม่นยำในการนำทางหน่วย ±30 ซม. นั้นมีจำกัดมากและใช้เพื่อการใส่ปุ๋ยเป็นหลักเท่านั้น ในการดำเนินการเพาะปลูกดิน การหว่าน การปกป้องพืช การเก็บเกี่ยว และการดำเนินการอื่นๆ จำเป็นต้องใช้เครื่องที่มีความแม่นยำสูงกว่า อุปกรณ์สำหรับระบบขับเคลื่อนแบบขนานที่แม่นยำยิ่งขึ้น ได้แก่:
เครื่องรับการนำทางที่มีความแม่นยำในการระบุตำแหน่งสูงถึง 10 ซม. สามารถทำงานที่ความถี่สองความถี่
- จอแสดงผลหรือแผง LED;
คอนโทรลเลอร์สำหรับคำนวณการเบี่ยงเบนความผิดปกติในเสาอากาศรับสัญญาณและปรับทิศทางการเคลื่อนที่
อุปกรณ์ทรัสเตอร์
มีวิธีทั่วไปหลายวิธีในการปรับสัญญาณนำทางด้วยดาวเทียมเพื่อให้ได้ความแม่นยำสูง การแก้ไขสามารถทำได้ทั้งจากดาวเทียมค้างฟ้าซึ่งจะเพิ่มความแม่นยำเป็น ±10 ซม. และจากสถานีฐานดาวเทียม RTK ซึ่งตั้งอยู่ใกล้กับสนาม
หลักการและระบบการขับขี่อัตโนมัติ (ออโต้ไพลอต).
การนำร่องอัตโนมัติแตกต่างจากการขับขี่แบบขนานตรงที่การเบี่ยงเบนไปจากวิถีที่กำหนดที่สร้างโดยตัวรับสัญญาณ GPS และตัวควบคุมการนำทางจะถูกนำเข้าโดยตรงไปยังระบบควบคุมไฮดรอลิกของโครงรถแทรกเตอร์ผ่านอุปกรณ์พิเศษ (วาล์วควบคุม) ซึ่งช่วยลดความเฉื่อยและการเล่นของพวงมาลัย นอกจากนี้ยังมีการติดตั้งเซ็นเซอร์มุมล้อแบบพิเศษบนรถแทรกเตอร์ ระบบนี้รับประกันความแม่นยำสูงสุด (ส่วนเบี่ยงเบน ± 2 ซม.) ของการเคลื่อนที่ไปตามเส้นทางโดยที่ผู้ปฏิบัติงานไม่ต้องดำเนินการ
ข้อได้เปรียบหลักของการใช้ระบบขับเคลื่อนแบบขนานคือการลดข้อผิดพลาด (การลดปัจจัยด้านมนุษย์) เมื่อประมวลผลฟิลด์ การปฏิบัติแสดงให้เห็นว่าเมื่อฉีดพ่นพืชผลด้วยวิธีดั้งเดิม ผู้ปฏิบัติงานส่วนใหญ่ชอบที่จะผ่านแถวที่อยู่ติดกันโดยให้เหลื่อมซ้อนกันเพื่อหลีกเลี่ยงช่องว่าง เป็นผลให้การทับซ้อนกันของแถวแม้จะใช้มาร์กเกอร์โฟมก็มีอย่างน้อย 5% การใช้ตัวบ่งชี้ทิศทางพร้อมตัวขับดันช่วยลดการทับซ้อนกันเป็น 2...3% หรือน้อยกว่า
ผู้รับรองรับตัวเลือกต่างๆ สำหรับการแก้ไข GPS รวมถึง WAAD, OmniSTAR การใช้การแก้ไขเหล่านี้ช่วยให้สามารถส่งผ่านได้อย่างแม่นยำถึง ±10 ซม.
แผงแสดงตำแหน่งปัจจุบันของรถเป็นภาพกราฟิกและให้ข้อมูลแก่ผู้ขับขี่ ข้อมูลเพิ่มเติมเมื่อกลับรถหรือขับรถในเลนโค้ง เธอมี จอแสดงผลกราฟิกด้วยความสามารถในการอ่านข้อมูลท่ามกลางแสงแดดจ้า
คอมพิวเตอร์ภาคสนามพร้อมซอฟต์แวร์ - ระบบจัดการข้อมูลภาคสนามที่ใช้ในการนำทาง การขับขี่อัตโนมัติ การบันทึกการสำรวจภาคสนาม การสำรวจพื้นที่ การใช้งานที่มีตัวบ่งชี้ตัวแปร
คอนโทรลเลอร์,โดยใช้ข้อมูลจากเครื่องรับ GPS และเซ็นเซอร์ภายในซึ่งหยุดนิ่งและทำงานบนแกน 6 แกน จะส่งคำสั่งไปยังระบบควบคุม
เซ็นเซอร์มุมล้อออกแบบมาเพื่อความต่อเนื่อง ข้อเสนอแนะพร้อมระบบควบคุมรถแทรกเตอร์
วาล์วไฮดรอลิกรับสัญญาณไฟฟ้าจากตัวควบคุมแล้วแปลงเป็นสัญญาณไฮดรอลิกซึ่งระบบจะใช้เพื่อให้รถอยู่ในเส้นทางที่กำหนด
ทรัสเตอร์ให้การขับขี่แบบขนานด้วยความแม่นยำ 10 ซม.
สถานีฐานส่งการแก้ไขตำแหน่ง GPS ไปยังเครื่องรับ GPS ของรถแทรกเตอร์ผ่านทางวิทยุหรือโมเด็ม GSM เพื่อระบุพิกัดด้วยความแม่นยำสูง (ข้อผิดพลาดน้อยกว่า ±2 ซม.)
มีตัวเลือกต่างๆ ที่เป็นไปได้ในการจัดวางอุปกรณ์บนรถแทรกเตอร์สำหรับการขับขี่แบบขนานและระบบขับเคลื่อนอัตโนมัติ
ชุดขั้นต่ำสำหรับการขับขี่แบบขนานที่มีความแม่นยำ ±30 ซม. ประกอบด้วยส่วนประกอบหลัก: แผง LED, เสาอากาศ, แผ่นยึดเสาอากาศ, ขาตั้งสำหรับติดตั้ง, ชุดสายเชื่อมต่อ, ซอฟต์แวร์และคำแนะนำในการใช้งาน
อุปกรณ์นี้เป็นที่ต้องการเนื่องจากช่วยประหยัดต้นทุน ตัวอย่างเช่น ในยุโรป ผลกระทบทางเศรษฐกิจจากการใช้อุปกรณ์ GPS ในภาคเกษตรกรรมมีมูลค่าสูงถึง 50...60 ยูโรต่อเฮกตาร์
อย่างไรก็ตาม การนำทางด้วยดาวเทียมแบบเดิมๆ ซึ่งใช้กันอย่างแพร่หลายในการขนส่งทางถนน สามารถให้ความแม่นยำสูงสุดเพียงประมาณ 2 เมตร ซึ่งเป็นที่ยอมรับไม่ได้สำหรับเทคโนโลยีการทำฟาร์มที่มีความแม่นยำ ในส่วนที่เกี่ยวข้องกับระบบนำทาง มีแนวคิดเรื่องความแม่นยำสัมบูรณ์และความแม่นยำสัมพัทธ์ ความแม่นยำสัมบูรณ์คือพิกัดจริงที่ใช้ในการระบุตำแหน่งของวัตถุ เช่น อาคาร รถยนต์ รถแทรกเตอร์ หรือรถผสม สำหรับระบบการทำฟาร์มที่แม่นยำ เราสามารถจำกัดตัวเองให้มีความแม่นยำสัมพัทธ์ได้ เช่น ตำแหน่งปัจจุบันของวัตถุ เช่น สัมพันธ์กับการผ่านครั้งแรก บน ในขณะนี้เวลา. ความแม่นยำสัมพัทธ์ควรถึงค่าลำดับ 2.5...30 ซม. ทั้งนี้ขึ้นอยู่กับอุปกรณ์ที่ใช้
ขณะนี้มีบริการแก้ไขหลายแห่งทั่วโลก แต่ สหพันธรัฐรัสเซียใช้งานได้เพียงอันเดียว - Omnistar HP/XP บริการทำงานดังนี้: Omnistar มีเครือข่ายสถานีฐานของตัวเองที่ตั้งอยู่ทั่วโลก พวกเขาเข้าแล้ว โหมดอัตโนมัติคำนวณการแก้ไขสัญญาณที่จำเป็น จากนั้นส่งการแก้ไขไปยังเครื่องรับ GPS เฉพาะผ่านดาวเทียมค้างฟ้า
นอกเหนือจากการแก้ไขส่วนต่างแล้ว โหมด RTK ยังใช้กันอย่างแพร่หลาย โดยที่ฟาร์มจะติดตั้งอยู่กับที่หรือพกพาได้ สถานีฐานและการแก้ไขจะถูกส่งไปยังเครื่องรับผ่านสัญญาณวิทยุที่มีความถี่ 450 หรือ 900 MHz ในกรณีนี้ ไม่จำเป็นต้องซื้อการสมัครสมาชิกสำหรับเครื่องรับแต่ละเครื่อง มีความแม่นยำในการกำหนดตำแหน่งที่ค่อนข้างสูง แต่ในทางกลับกัน จะต้องเสียค่าใช้จ่ายเพียงครั้งเดียวที่สำคัญในการซื้อและติดตั้งอุปกรณ์ นอกจากนี้ยังมีข้อจำกัดเกี่ยวกับพื้นที่ครอบคลุมเนื่องจากลักษณะของสัญญาณ ดังนั้นสำหรับสถานีฐานที่อยู่กับที่ ข้อ จำกัด นี้คือวงกลมที่มีรัศมี 11 กม. ซึ่งอยู่ตรงกลางซึ่งสถานีฐานตั้งอยู่ สำหรับแบบพกพา - น้อยกว่าเล็กน้อย ในต่างประเทศ ฟาร์มหลายแห่งกำลังรวม RTK ของตนเพื่อลดต้นทุนโดยรวมและครอบคลุมทุ่งนาได้ครบถ้วนยิ่งขึ้น ในขณะที่สัญญาณยังสามารถขายต่อได้
เนื่องจากความแม่นยำในการขับขี่ขึ้นอยู่กับความแม่นยำในการวัดของเครื่องรับ GPS โดยตรง จึงเป็นสิ่งสำคัญมากที่ผู้ควบคุมเครื่องจักรจะต้องทราบหลักการพื้นฐานของการทำงานของเครื่องรับ ความแม่นยำในการกำหนดตำแหน่งได้รับอิทธิพลจากปัจจัยหลักหลายประการ: ความคลาดเคลื่อนของเวลา จำนวนดาวเทียมที่สังเกตได้พร้อมกัน การรบกวนในชั้นบรรยากาศ ความแปรผันของวงโคจรดาวเทียม การแพร่กระจายสัญญาณหลายเส้นทาง ฯลฯ
ระบบการขับขี่แบบขนานและระบบอัตโนมัติช่วยรักษาระยะห่างระหว่างทางเดินของเครื่องจักรได้อย่างแม่นยำเมื่อปฏิบัติงานภาคสนาม เมื่อใช้งาน การดำเนินการทางเทคโนโลยีจะดำเนินการโดยมีการทับซ้อนกันน้อยที่สุด ช่วยประหยัดเวลาในการทำงานและเครื่องจักร เชื้อเพลิงและน้ำมันหล่อลื่น เมล็ดพืช ปุ๋ย และผลิตภัณฑ์ปกป้องพืช การนำทางสะดวกมากสำหรับการฉีดพ่นซึ่งทำได้ดีที่สุดในเวลากลางคืนเมื่ออุณหภูมิของอากาศลดลงและไม่มีลม ดังนั้นข้อดีของระบบขับเคลื่อนแบบขนานคือ:
ความแม่นยำในการเคลื่อนที่ของหน่วยตามระยะห่างของแถว
การลดภาระของคนขับรถแทรกเตอร์ (คนขับ)
ความสามารถในการทำงานในที่มืดและในสภาพทัศนวิสัยไม่ดี
เพื่อจุดประสงค์นี้ ระบบขับเคลื่อนแบบขนานจึงมีอินเทอร์เฟซพิเศษที่ช่วยอำนวยความสะดวกในการทำงานอย่างมาก
การเคลื่อนไหวสามารถทำได้ทั้งตามแนวเส้นตรงและแนวโค้ง อย่างไรก็ตาม ความแม่นยำของการนำทาง โดยเฉพาะอย่างยิ่งเมื่อทำงานกับยูนิตที่มีเส้นทางจะสูงกว่าเมื่อเคลื่อนที่ไปตามเส้นตรง
V. I. Balabanov, A. I. Belenkov, E. V. Berezovsky, V. V. Egorov, S. V. Zhelezova
คู่มือ: "เทคโนโลยีการนำทางในการเกษตร"
ทุ่ง Trans-Urals หมายเลข 7 (129) สิงหาคม 2558
หน้าปัจจุบัน: 2 (หนังสือมีทั้งหมด 7 หน้า) [ข้อความอ่านที่มีอยู่: 2 หน้า]
ประสบการณ์ทั้งในและต่างประเทศแสดงให้เห็นถึงประสิทธิภาพสูงของเทคโนโลยีการทำฟาร์มที่แม่นยำ โดยเฉพาะอย่างยิ่งเมื่อนำไปใช้กับฟาร์มขนาดใหญ่ ตัวอย่างเช่น ตามสถิติที่มีอยู่ ในปี 2549 เกษตรกรในสหรัฐฯ มากกว่า 80% ใช้เทคโนโลยีการทำฟาร์มที่แม่นยำในระดับหนึ่งหรืออย่างอื่น ซึ่งต้องขอบคุณที่พวกเขาสามารถเพิ่มผลผลิตธัญพืชเป็น 90 c/ha ในเวลาเดียวกัน มีการพิสูจน์แล้วว่าค่าใช้จ่ายในการแนะนำเกษตรกรรมที่แม่นยำนั้นให้ผลตอบแทนหลังจากใช้งานไป 2...4 ปี และเริ่มสร้างผลกำไรจำนวนมาก
ปัจจุบัน การทำฟาร์มแบบแม่นยำกำลังแพร่หลายมากขึ้นในหลายประเทศ รวมถึงรัสเซียด้วย ในเวลาเดียวกัน การวิจัยในสาขาเกษตรกรรมแม่นยำในช่วง 15 ปีที่ผ่านมาแสดงให้เห็นว่าสาขานี้เป็นสาขาสหสาขาวิชาชีพ การพัฒนาและการนำเข้าสู่การผลิตอย่างกว้างขวางจะต้องใช้เวลาและทรัพยากรทางการเงินมากกว่าการใช้เทคโนโลยีแบบดั้งเดิม
คำถามทดสอบและการมอบหมายงาน
1. แนวคิดเรื่อง “เกษตรแม่นยำ” เกิดขึ้นเมื่อใดและที่ไหน
2. ใช้กับเครื่องจักรการเกษตรรุ่นใด และระบบอิเล็กทรอนิกส์ ยี่ห้อใด ใช้งานครั้งแรก?
3. งานอะไรในด้านเกษตรกรรมที่แม่นยำในสหภาพโซเวียตและประเทศสังคมนิยมอื่น ๆ?
4. เครื่องหยอดเมล็ดที่แม่นยำเครื่องแรกปรากฏขึ้นเมื่อใดและที่ไหน?
5. บริษัทใดเป็นคนแรกที่วางอุปกรณ์นำทางบนอุปกรณ์ของตน
6. ปัจจุบันเทคโนโลยีการทำฟาร์มแบบแม่นยำมีการพัฒนามากที่สุดในประเทศใดบ้าง
3. ระบบขับเคลื่อนแบบขนานและอัตโนมัติ
ในด้านการเกษตร อุปกรณ์สามประเภทสำหรับควบคุมการเคลื่อนที่ของรถแทรกเตอร์และรถผสมผสานโดยใช้เครื่องรับ GPS ได้กลายเป็นที่แพร่หลายและได้พิสูจน์ประสิทธิภาพแล้ว: ระบบขับเคลื่อนแบบขนานและเครื่องขับดันสำหรับระบบอัตโนมัติ การใช้ระบบนำทางในอวกาศเป็นไปได้หลังจากติดตั้งเครื่องรับพิเศษบนยานพาหนะซึ่งรับสัญญาณเกี่ยวกับตำแหน่งของดาวเทียมนำทางและระยะทางอย่างต่อเนื่อง ขึ้นอยู่กับความแม่นยำที่ต้องการ อุปกรณ์ดังกล่าวจะถูกควบคุมโดยผู้ปฏิบัติงานด้วยตนเองตามเครื่องหมายบนหน้าจอแสดงผล หรือใช้ทรัสเตอร์หรือระบบอัตโนมัติ
ระบบขับเคลื่อนแบบขนานเป็นส่วนที่มองเห็นได้ชัดเจนที่สุดและจ่ายผลตอบแทนเร็วที่สุดในเทคโนโลยีการทำฟาร์มที่แม่นยำ ออกแบบมาสำหรับงานภาคสนามและมีประสิทธิภาพสูงสุดเมื่อใช้กับอุปกรณ์หน้ากว้าง
ระบบขับเคลื่อนแบบขนาน- เป็นการมีส่วนร่วมของผู้ปฏิบัติงานในการควบคุมเครื่องจักรตามโครงการ “ การวัดพิกัดปัจจุบันของเครื่องจักรกลการเกษตร - การแสดงค่าเบี่ยงเบนไปจากเส้นทางที่กำหนดบนจอแสดงผลในห้องโดยสาร - การหมุนพวงมาลัยโดยผู้ปฏิบัติงานเพื่อเก็บ หน่วยบนเส้นทางที่กำหนด” (รูปที่ 3)
ข้าว. 3. หลักการทำงานของอุปกรณ์
น่าเสียดายที่ปฏิกิริยาทางจิตของคนทั่วไปไม่อนุญาตให้ขับรถคู่ขนานโดยมีความเบี่ยงเบนน้อยกว่า ±30 ซม. ซึ่งสอดคล้องกับความแม่นยำของเครื่องรับ GPS ที่อาศัยดาวเทียม 24 ดวงตามปกติเท่านั้น โดยทั่วไป ระบบขับเคลื่อนแบบขนานที่ง่ายที่สุดประกอบด้วยเครื่องรับ GPS พร้อมเสาอากาศภายนอกและไฟแสดงทิศทางที่มุ่งหน้าไป ระบบนี้ติดตั้งได้ง่ายและรวดเร็วบนรถแทรกเตอร์หรือรถผสม สิ่งที่คุณต้องมีคือการเชื่อมต่อสายไฟและการติดตั้งหน่วยภายนอก (ตัวรับสัญญาณ GPS) การฝึกอบรมผู้ควบคุมเครื่องจักรให้ทำงานกับอุปกรณ์ประเภทนี้ ขึ้นอยู่กับ "ความลึก" ของการศึกษาที่ต้องการ โดยมีตั้งแต่หลายนาทีไปจนถึงหนึ่งวัน
ควรสังเกตว่าการใช้อุปกรณ์ขับเคลื่อนแบบขนานที่มีความแม่นยำในการนำทางหน่วย ±30 ซม. นั้นมีจำกัดมากและใช้เพื่อการใส่ปุ๋ยเป็นหลักเท่านั้น ในการดำเนินการเพาะปลูกดิน การหว่าน การปกป้องพืช การเก็บเกี่ยว และการดำเนินการอื่นๆ จำเป็นต้องใช้เครื่องที่มีความแม่นยำสูงกว่า อุปกรณ์สำหรับระบบขับเคลื่อนแบบขนานที่แม่นยำยิ่งขึ้น ได้แก่:
เครื่องรับนำทางที่มีความแม่นยำในการระบุตำแหน่งสูงถึง 10 ซม. สามารถทำงานที่สองความถี่ได้ (รูปที่ 4)
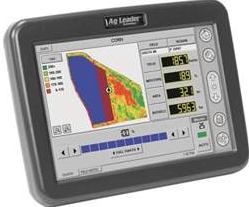
จอแสดงผล (รูปที่ 5) หรือแผง LED (รูปที่ 6)
ตัวควบคุมสำหรับคำนวณความเบี่ยงเบนของความผิดปกติในเสาอากาศรับสัญญาณและปรับทิศทางการเคลื่อนที่ (รูปที่ 7)
ทรัสเตอร์ (รูปที่ 10)
มีวิธีทั่วไปหลายวิธีในการปรับสัญญาณนำทางด้วยดาวเทียมเพื่อให้ได้ความแม่นยำสูง การแก้ไขสามารถรับได้ทั้งจากดาวเทียมค้างฟ้าซึ่งจะเพิ่มความแม่นยำเป็น ±10 ซม. และจากสถานีฐานดาวเทียม RTK (รูปที่ 10) ซึ่งตั้งอยู่ใกล้กับสนาม
หลักการและระบบการขับขี่อัตโนมัติ (ออโต้ไพลอต)- การนำร่องอัตโนมัติแตกต่างจากการขับขี่แบบขนานตรงที่การเบี่ยงเบนจากวิถีที่กำหนดที่สร้างโดยตัวรับสัญญาณ GPS และตัวควบคุมการนำทางจะถูกนำเข้าโดยตรงไปยังระบบควบคุมไฮดรอลิกของโครงรถแทรกเตอร์ผ่านอุปกรณ์พิเศษ (วาล์วควบคุม) (รูปที่ 9) ซึ่งช่วยลดความเฉื่อยและการเล่นของพวงมาลัย . นอกจากนี้ มีการติดตั้งเซ็นเซอร์มุมล้อแบบพิเศษบนรถแทรกเตอร์ (รูปที่ 8) ระบบนี้รับประกันความแม่นยำสูงสุด (ส่วนเบี่ยงเบน ± 2 ซม.) ของการเคลื่อนที่ไปตามเส้นทางโดยที่ผู้ปฏิบัติงานไม่ต้องดำเนินการ
ข้อได้เปรียบหลักของการใช้ระบบขับเคลื่อนแบบขนานคือการลดข้อผิดพลาด (การลดปัจจัยด้านมนุษย์) เมื่อประมวลผลฟิลด์ การปฏิบัติแสดงให้เห็นว่าเมื่อฉีดพ่นพืชผลด้วยวิธีดั้งเดิม ผู้ปฏิบัติงานส่วนใหญ่ชอบที่จะผ่านแถวที่อยู่ติดกันโดยให้เหลื่อมซ้อนกันเพื่อหลีกเลี่ยงช่องว่าง เป็นผลให้การทับซ้อนกันของแถวแม้จะใช้มาร์กเกอร์โฟมก็มีอย่างน้อย 5% การใช้ตัวบ่งชี้ทิศทางพร้อมตัวขับดันช่วยลดการทับซ้อนกันเป็น 2...3% หรือน้อยกว่า

ข้าว. 4. เครื่องรับ AgGPS 252
เครื่องรับรองรับตัวเลือกต่างๆ สำหรับการแก้ไข GPS รวมถึง WAAD, OmniSTAR การใช้การแก้ไขเหล่านี้ช่วยให้สามารถส่งผ่านได้อย่างแม่นยำถึง ±10 ซม.

ข้าว. 5. แผง AgGPS LED EZ-GUIDE PLUS หรือ EZ-GUIDE 500
แผงหน้าปัดจะแสดงตำแหน่งปัจจุบันของรถเป็นภาพกราฟิก และให้ข้อมูลเพิ่มเติมแก่ผู้ขับขี่เมื่อกลับรถหรือขับขี่ในเลนโค้ง มีจอแสดงผลกราฟิกที่สามารถอ่านข้อมูลในแสงแดดจ้าได้
ข้าว. 6. คอมพิวเตอร์ภาคสนาม Insight พร้อมซอฟต์แวร์
คอมพิวเตอร์ภาคสนามพร้อมซอฟต์แวร์ - ระบบจัดการข้อมูลภาคสนามที่ใช้ในการนำทาง การขับขี่อัตโนมัติ การบันทึก การสำรวจภาคสนาม การสำรวจพื้นที่ การประยุกต์ใช้งานพร้อมตัวบ่งชี้ตัวแปร

ข้าว. 7. ตัวควบคุม AgGPS NAVCONTROLLER II
ตัวควบคุมซึ่งใช้ข้อมูลจากตัวรับสัญญาณ GPS และเซ็นเซอร์ภายในซึ่งอยู่นิ่งและทำงานบนแกน 6 แกน จะส่งคำสั่งไปยังระบบควบคุม

ข้าว. 8 – เซ็นเซอร์มุมล้อ
เซ็นเซอร์มุมล้อได้รับการออกแบบเพื่อให้ป้อนกลับระบบควบคุมรถแทรกเตอร์อย่างต่อเนื่อง
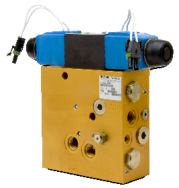
ข้าว. 9 – วาล์วควบคุม
วาล์วไฮดรอลิกจะรับสัญญาณไฟฟ้าจากตัวควบคุมและแปลงเป็นสัญญาณไฮดรอลิก ซึ่งระบบจะใช้เพื่อให้รถอยู่ในเส้นทางที่กำหนด
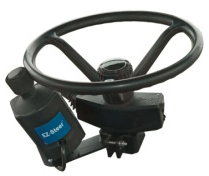
ข้าว. 10 – ทรัสเตอร์
ทรัสเตอร์ช่วยให้มั่นใจในการขับขี่แบบขนานด้วยความแม่นยำ 10 ซม.
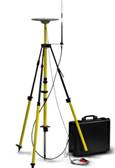
ข้าว. 11 – สถานีฐาน (RTK)
สถานีฐานจะส่งการแก้ไขตำแหน่ง GPS ไปยังเครื่องรับ GPS ของรถแทรกเตอร์ผ่านทางวิทยุหรือโมเด็ม GSM เพื่อระบุพิกัดด้วยความแม่นยำสูง (ข้อผิดพลาดน้อยกว่า ±2 ซม.)
ตัวเลือกที่เป็นไปได้สำหรับการจัดวางอุปกรณ์บนรถแทรกเตอร์สำหรับการขับขี่แบบขนานและระบบขับเคลื่อนอัตโนมัติแสดงไว้ในรูปที่ 1 12.
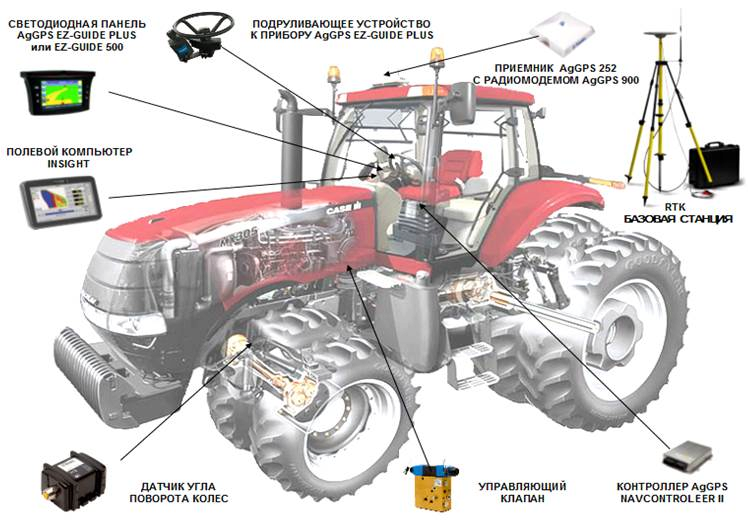
ข้าว. 12. ตำแหน่งอุปกรณ์สำหรับการขับขี่แบบขนานและอัตโนมัติบนรถแทรกเตอร์ (ภาพจากเว็บไซต์ http://www.trimble.com/agriculture/autopilot.aspx)
ค่าต่ำสุดที่ตั้งไว้สำหรับการขับขี่แบบขนานด้วยความแม่นยำ ±30 ซม. แสดงไว้ในรูปที่ 1 13. ส่วนประกอบหลัก ได้แก่ แผงไฟ LED เสาอากาศ แผ่นยึดเสาอากาศ แท่นยึด ชุดสายเชื่อมต่อ ซอฟต์แวร์ และคำแนะนำในการใช้งาน
อุปกรณ์นี้เป็นที่ต้องการเนื่องจากช่วยประหยัดต้นทุน ตัวอย่างเช่น ในยุโรป ผลกระทบทางเศรษฐกิจจากการใช้อุปกรณ์ GPS ในภาคเกษตรกรรมมีมูลค่าสูงถึง 50...60 ยูโรต่อเฮกตาร์
อย่างไรก็ตาม การนำทางด้วยดาวเทียมแบบเดิมๆ ซึ่งใช้กันอย่างแพร่หลายในการขนส่งทางถนน สามารถให้ความแม่นยำสูงสุดเพียงประมาณ 2 เมตร ซึ่งเป็นที่ยอมรับไม่ได้สำหรับเทคโนโลยีการทำฟาร์มที่มีความแม่นยำ ในส่วนที่เกี่ยวข้องกับระบบนำทาง มีแนวคิดเกี่ยวกับความแม่นยำสัมบูรณ์และความแม่นยำสัมพัทธ์ ความแม่นยำสัมบูรณ์คือพิกัดจริงที่ใช้ในการระบุตำแหน่งของวัตถุ เช่น อาคาร รถยนต์ รถแทรกเตอร์ หรือรถผสม สำหรับระบบการทำฟาร์มที่แม่นยำ เราสามารถจำกัดตัวเองให้มีความแม่นยำสัมพัทธ์ได้ เช่น ตำแหน่งปัจจุบันของวัตถุ สัมพันธ์กับการผ่านครั้งแรก ในเวลาที่กำหนด ความแม่นยำสัมพัทธ์ควรถึงค่าลำดับ 2.5...30 ซม. ทั้งนี้ขึ้นอยู่กับอุปกรณ์ที่ใช้
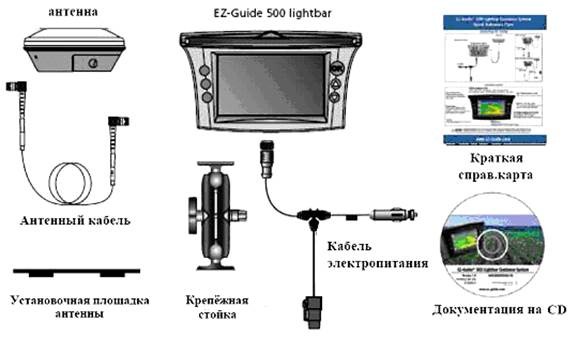
ข้าว. 13. ส่วนประกอบของระบบมาตรฐาน
ปัจจุบัน มีบริการแก้ไขหลายแห่งในโลก แต่มีเพียงบริการเดียวเท่านั้นที่ดำเนินการในสหพันธรัฐรัสเซีย - Omnistar HP/XP บริการทำงานดังนี้: Omnistar มีเครือข่ายสถานีฐานของตัวเองที่ตั้งอยู่ทั่วโลก โดยจะคำนวณการแก้ไขสัญญาณที่จำเป็นโดยอัตโนมัติ จากนั้นจึงส่งข้อมูลการแก้ไขไปยังเครื่องรับ GPS เฉพาะเจาะจงผ่านดาวเทียมค้างฟ้า
นอกเหนือจากการแก้ไขส่วนต่างแล้ว โหมด RTK ยังใช้กันอย่างแพร่หลาย ซึ่งฟาร์มมีสถานีฐานแบบอยู่กับที่หรือแบบพกพาของตัวเอง และการแก้ไขจะถูกส่งไปยังเครื่องรับด้วยสัญญาณวิทยุที่มีความถี่ 450 หรือ 900 MHz ในกรณีนี้ ไม่จำเป็นต้องซื้อการสมัครสมาชิกสำหรับเครื่องรับแต่ละเครื่อง มีความแม่นยำในการกำหนดตำแหน่งที่ค่อนข้างสูง แต่ในทางกลับกัน จะต้องเสียค่าใช้จ่ายเพียงครั้งเดียวที่สำคัญในการซื้อและติดตั้งอุปกรณ์ นอกจากนี้ยังมีข้อจำกัดเกี่ยวกับพื้นที่ครอบคลุมเนื่องจากลักษณะของสัญญาณ ดังนั้นสำหรับสถานีฐานที่อยู่กับที่ ข้อ จำกัด นี้คือวงกลมที่มีรัศมี 11 กม. ซึ่งอยู่ตรงกลางซึ่งสถานีฐานตั้งอยู่ สำหรับแบบพกพา - น้อยกว่าเล็กน้อย ในต่างประเทศ ฟาร์มหลายแห่งกำลังรวม RTK ของตนเพื่อลดต้นทุนโดยรวมและครอบคลุมทุ่งนาได้ครบถ้วนยิ่งขึ้น ในขณะที่สัญญาณยังสามารถขายต่อได้
เนื่องจากความแม่นยำในการขับขี่ขึ้นอยู่กับความแม่นยำในการวัดของเครื่องรับ GPS โดยตรง จึงเป็นสิ่งสำคัญมากที่ผู้ควบคุมเครื่องจักรจะต้องทราบหลักการพื้นฐานของการทำงานของเครื่องรับ ความแม่นยำในการกำหนดตำแหน่งได้รับอิทธิพลจากปัจจัยหลักหลายประการ: ความคลาดเคลื่อนของเวลา จำนวนดาวเทียมที่สังเกตได้พร้อมกัน การรบกวนในชั้นบรรยากาศ ความแปรผันของวงโคจรดาวเทียม การแพร่กระจายสัญญาณหลายเส้นทาง ฯลฯ
ระบบการขับขี่แบบขนานและระบบอัตโนมัติช่วยรักษาระยะห่างระหว่างทางเดินของเครื่องจักรได้อย่างแม่นยำเมื่อปฏิบัติงานภาคสนาม เมื่อใช้งาน การดำเนินการทางเทคโนโลยีจะดำเนินการโดยมีการทับซ้อนกันน้อยที่สุด ช่วยประหยัดเวลาในการทำงานและเครื่องจักร เชื้อเพลิงและน้ำมันหล่อลื่น เมล็ดพืช ปุ๋ย และผลิตภัณฑ์ปกป้องพืช การนำทางสะดวกมากสำหรับการฉีดพ่นซึ่งทำได้ดีที่สุดในเวลากลางคืนเมื่ออุณหภูมิของอากาศลดลงและไม่มีลม ดังนั้นข้อดีของระบบขับเคลื่อนแบบขนานคือ:
ความแม่นยำของการเคลื่อนที่ของหน่วยตามระยะห่างของแถว
ลดภาระของคนขับรถแทรกเตอร์ (คนขับ)
ความสามารถในการทำงานในที่มืดและในสภาพทัศนวิสัยไม่ดี
เพื่อจุดประสงค์นี้ ระบบขับเคลื่อนแบบขนาน (รูปที่ 14) มีอินเทอร์เฟซพิเศษที่ช่วยอำนวยความสะดวกในการทำงานอย่างมาก
การเคลื่อนไหวสามารถทำได้ทั้งบนวิถีทางตรงและทางโค้ง (รูปที่ 15) อย่างไรก็ตาม ความแม่นยำของการนำทาง โดยเฉพาะอย่างยิ่งเมื่อทำงานกับยูนิตที่มีการติดตามจะสูงกว่าเมื่อเคลื่อนที่ไปตามเส้นตรง

ข้าว. 14. อุปกรณ์นำทางแถบไฟ EZ-Guide 500 สำหรับระบบออโตไพลอตในการทำงาน

ข้าว. 15. วิถีการเคลื่อนที่ที่เป็นไปได้ของหน่วย (วาดจากเว็บไซต์ http://www.geomir.ru/ag_navigation_ru)
การทดสอบระบบนำทางในรัสเซียดำเนินการโดย Geomir Center ในปี 2547 ในสถานที่ของ Inteko-Agro LLC ในภูมิภาค Belgorod แสดงให้เห็นว่าการติดตั้งระบบบนรถแทรกเตอร์ John Deere ที่ไม่ได้เตรียมตัวไว้ใช้เวลาประมาณ 10 นาที
ทีมงานผู้ควบคุมเครื่องจักร 12 คนซึ่งไม่เคยทำงานกับระบบขับเคลื่อนแบบขนานมาก่อน ได้ดำเนินการภาคสนามด้วยเครื่องคราดพรวน Horsch (18.3 ม.) ในสองรอบที่ยาวประมาณ 800 ม. ในขณะที่ข้อผิดพลาดในระยะห่างระหว่างแถวคือ 25 ซม. ใช้การแก้ไขดาวเทียม VBS Omnistar ระบบการขับขี่แบบขนานและระบบขับเคลื่อนอัตโนมัติมีคุณสมบัติเดียว “หัวใจ” ของระบบเหล่านี้ – เครื่องรับ GPS – คือเซ็นเซอร์ประเภทหนึ่ง ซึ่งการนำเข้าและจำหน่ายในรัสเซียได้รับการควบคุมอย่างเข้มงวดโดยรัฐ ดังนั้นการขายตามกฎหมายจึงเป็นไปได้หลังจากการรับรองและใบอนุญาตเท่านั้น ขั้นตอนเหล่านี้ได้ดำเนินการไปแล้วสำหรับระบบจำนวนหนึ่ง และได้รับการอนุมัติให้ขายแล้ว
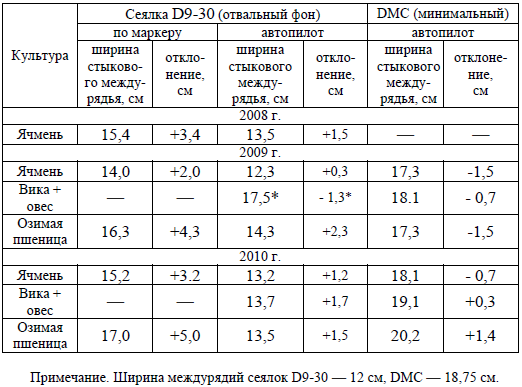
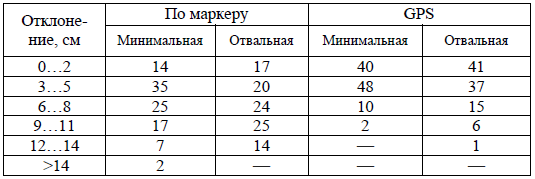
ในตาราง รูปที่ 1 นำเสนอข้อมูลจากการศึกษาสามปีเกี่ยวกับขนาดของระยะห่างระหว่างก้นเมื่อหว่านพืชต่างๆ โดยใช้เครื่องหมาย และใช้ระบบอัตโนมัติ (รูปที่ 16, 17) ที่ Russian State Agrarian University - Moscow Agricultural Academy ตั้งชื่อตาม K. A. Timiryazev
ตารางที่ 1 ค่าของระยะห่างแถวชนและการเบี่ยงเบนจากระยะห่างแถวมาตรฐานของเครื่องหยอด

ข้าว. 16. มุมมองของระยะห่างระหว่างแถวก้นเมื่อหว่านตามเครื่องหมาย

ข้าว. 17. มุมมองของระยะห่างระหว่างแถวก้นเมื่อหว่านโดยใช้ระบบอัตโนมัติ
การหว่านเมล็ดพืช (ข้าวสาลีฤดูหนาวและข้าวบาร์เลย์) ดำเนินการในกรณีหนึ่งโดยใช้ระบบอัตโนมัติ และอีกกรณีหนึ่งโดยใช้เครื่องหมาย ในกรณีนี้ การหว่านข้าวสาลีฤดูหนาวและข้าวบาร์เลย์บนพื้นหลังแบบหล่อได้ดำเนินการโดยใช้เครื่องหยอดเมล็ดธรรมดา D9-30 Amazone (ต่อไปนี้จะเรียกว่า D-9-30) โดยใช้ระบบอัตโนมัติและเครื่องหมาย ตามตัวเลือกการไถพรวนแบบศูนย์ (ไม่มีการไถพรวน) และการไถพรวนขั้นต่ำ การหว่านจะดำเนินการโดยใช้เครื่องหยอดเมล็ดโดยตรงแบบใช้ลม DMC Primera-3000 Amazone (ต่อไปนี้จะเรียกว่า DMC) โดยใช้ระบบอัตโนมัติเท่านั้น การหว่านส่วนผสมของหญ้าข้าวโอ๊ตดำเนินการโดยใช้เครื่องหยอดเมล็ดสองเครื่อง: D9-30 สำหรับการไถ, DMC สำหรับตัวเลือกศูนย์เมื่อใช้ระบบอัตโนมัติเท่านั้น
ในระหว่างการวิจัย พบว่าระยะห่างแถวก้นระหว่างช่องหยอดเมล็ดที่อยู่ติดกันไม่เท่ากัน เมื่อหว่านพืชเมล็ดพืชและส่วนผสมข้าวโอ๊ตโดยใช้เครื่องหมายและระบบอัตโนมัติ ดังนั้นในปี 2008 จึงมีการใช้เครื่องหยอดเมล็ด D9-30 เพื่อหว่านข้าวบาร์เลย์โดยใช้ตัวเลือกการไถพรวนแบบแม่พิมพ์ ในเวลาเดียวกันค่าเบี่ยงเบนของค่าของระยะห่างของแถวชนจากระยะห่างของแถวมาตรฐานที่กำหนดโดยการออกแบบของเครื่องหยอดเมล็ดในกรณีของการหว่านข้าวบาร์เลย์ตามเครื่องหมาย 3.4 ซม. โดยใช้ระบบอัตโนมัติ - 1.5 ซม. .
แม้ว่าค่าเบี่ยงเบนเฉลี่ยค่อนข้างดี (0.63 และ 2.98 ซม. ในการทำซ้ำครั้งแรกและ 1.59 และ 2.68 ซม. ในวินาทีตามลำดับ) การหว่านข้าวบาร์เลย์โดยใช้เครื่องหมาย (รูปที่ 16) แสดงให้เห็นความแตกต่างที่มากขึ้นในพารามิเตอร์ของแถวก้น ระยะห่าง - จาก +13.75 ซม. ถึง – 9.0 ซม. ความคลาดเคลื่อนระหว่างระยะห่างของแถวอาจส่งผลเสีย โดยเฉพาะอย่างยิ่งเมื่อปลูกพืชแถว เมื่อใช้ระบบออโตไพลอต ไม่พบความเบี่ยงเบนที่มีนัยสำคัญดังกล่าว (รูปที่ 17) สำหรับการทำงานของระบบอัตโนมัติบนแม่พิมพ์บอร์ดและพื้นหลังขั้นต่ำส่วนเบี่ยงเบนในส่วนหลังจะมีค่าน้อยกว่าเนื่องจากบนดินที่มีความหนาแน่นมากขึ้นจะควบคุมรถแทรกเตอร์ได้ง่ายกว่า
จำเป็นต้องทราบข้อดีที่สำคัญอีกประการหนึ่งของระบบออโตไพลอตเมื่อเปรียบเทียบกับมาร์กเกอร์ เมื่อทำงานภายใต้ระบบที่ไม่มีการไถพรวน เครื่องหมาย โดยเฉพาะเวลาพลบค่ำจะมองเห็นได้ไม่ชัดเจนนัก “ระบบอัตโนมัติ” ช่วยให้คุณทำงานได้ตลอดเวลา สถานการณ์นี้เพียงอย่างเดียวสามารถเพิ่มประสิทธิภาพการทำงานในภาคเกษตรกรรมได้อย่างมาก: ผู้ควบคุมเครื่องจักรสองคนสามารถผลัดกันทำงานกับรถแทรกเตอร์คันเดียวโดยไม่ต้องหยุดพักตลอด 24 ชั่วโมงต่อวัน และดำเนินการหว่านในเวลาที่สั้นที่สุดและเทคนิคทางการเกษตรที่ดีที่สุด (รูปที่ 18)
ในปี 2010 ความคลาดเคลื่อนของความกว้างของระยะห่างระหว่างแถวก้นสำหรับพืชผลแต่ละชนิดปรากฏดังนี้ สำหรับข้าวสาลีฤดูหนาว เมื่อหว่านโดยใช้แม่พิมพ์ไถพรวน D9-30 โดยใช้ปากกามาร์กเกอร์ ระยะห่างระหว่างระยะที่หยอดเมล็ดที่อยู่ติดกันคือ 5 ซม. สำหรับข้าวบาร์เลย์ – 3.2 ซม. เมื่อหว่านโดยใช้ระบบอัตโนมัติ จะได้ผลลัพธ์: 1.5 และ 1.2 ซม. ตามลำดับ . สำหรับผักที่มีข้าวโอ๊ต ค่านี้คือ 1.7 ซม. ความเบี่ยงเบนเมื่อหว่านพืชเหล่านี้ด้วยเครื่องหยอดเมล็ด DMC โดยใช้ระบบ GPS คือ: สำหรับข้าวสาลีฤดูหนาว - 1.4 ซม. ข้าวบาร์เลย์ – 0.7 ซม. เพาะเมล็ดข้าวโอ๊ต -0.3 ซม. โดยระยะห่างระหว่างแถวของเครื่องหยอดเมล็ดอยู่ที่ 18.8 ซม. ความคลาดเคลื่อนเหล่านี้จึงค่อนข้างยอมรับได้

ข้าว. 18.งานกลางคืนด้วยระบบออโต้ไพลอต
ในการปลูกพืชแถว นอกเหนือจากการปลูกที่แม่นยำแล้ว ยังต้องมีการเพาะปลูกแบบสลับแถวอีกด้วย ดังนั้นเมื่อใช้ระบบนำทาง จำเป็นต้องมีความแม่นยำสูงในการนำทางของเครื่อง
ในระหว่างการทดลอง มีการพยายามที่จะปรับระบบอัตโนมัติสำหรับการแปรรูปมันฝรั่งแบบเรียงกัน มีการเลือกพื้นที่บนทางลาดสำหรับมันฝรั่งเพื่อทำให้การทำงานของระบบอัตโนมัติยากขึ้น (รูปที่ 19) วิถีที่เคลื่อนที่โดยเครื่องปลูกมันฝรั่งถูกโหลดเข้าสู่คอมพิวเตอร์ของระบบออโตไพลอตเพื่อเป็นงานสำหรับสันเขาเดิม (รูปที่ 20)
ระบบอัตโนมัติสามารถรับมือกับงานที่อาจเป็นเรื่องยากสำหรับผู้ควบคุมเครื่องจักรทั่วไปให้สำเร็จได้อย่างง่ายดาย เนื่องจากรถแทรกเตอร์ถูกดึงลงมาตามทางลาด ระบบออโตไพลอตสามารถบังคับรถแทรกเตอร์ที่เคลื่อนที่เกือบไปด้านข้างได้ ผลลัพธ์ที่ได้คือสันเขาที่ตรงอย่างสมบูรณ์แบบและการถ่ายภาพต่อเนื่องที่สม่ำเสมอแม้บนทางลาด (รูปที่ 21)

ข้าว. 19. การปลูกมันฝรั่งบนทางลาดด้วยระบบ Autopilot

ข้าว. 20. การสร้างสันมันฝรั่งโดยใช้ระบบอัตโนมัติ

ข้าว. 21. สันเขาตรงและต้นกล้ามันฝรั่งตามอุดมคติ (การปลูกและการสร้างสันบนระบบอัตโนมัติ)
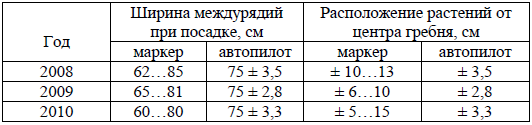
ปลูกมันฝรั่งโดยใช้เครื่องปลูกมันฝรั่ง GL-34T โดยใช้ระบบอัตโนมัติและปากกามาร์กเกอร์ (ดูรูปที่ 19) วิถีโคจรที่ระบุของเครื่องโดยใช้ระบบ GPS ถูกทำซ้ำในตัวเลือกการทำฟาร์มที่แม่นยำในระหว่างการก่อตัวของต้นกล้ามันฝรั่ง ตามเทคโนโลยีการเพาะปลูกมันฝรั่งแบบดั้งเดิม เทคนิคนี้ดำเนินการด้วยการมองเห็น กล่าวคือ การเคลื่อนไหวของเครื่องถูกควบคุมโดยผู้ควบคุมเครื่องจักร ความกว้างของระยะห่างระหว่างแถวระหว่างการผ่านของชาวไร่มันฝรั่งเมื่อใช้มาร์กเกอร์และระบบอัตโนมัติจะแตกต่างกันเล็กน้อยในแต่ละปี โดยเฉลี่ยตามเทคโนโลยีดั้งเดิมคือ 60...65 ถึง 80...85 ซม. เช่น ส่วนเบี่ยงเบนจากมาตรฐาน ระยะห่างระหว่างแถวของกระถางต้นไม้ (75 ซม.) อยู่ในช่วง – 15 ถึง +10 ซม. การใช้ระบบอัตโนมัติช่วยให้มั่นใจได้ว่าแถวที่อยู่ติดกันมีความเบี่ยงเบนจากแนวตรงตั้งแต่ 2.8 ถึง 3.0 ซม. (ตารางที่ 2)
ตารางที่ 2 ความกว้างของระยะห่างระหว่างแถวก้นและการจัดเรียงต้นมันฝรั่งบนสันสำหรับเทคโนโลยีการเพาะปลูกที่แตกต่างกัน
เงื่อนไขที่สำคัญสำหรับการพัฒนาต้นมันฝรั่งที่เต็มเปี่ยมคือตำแหน่งของมันซึ่งสัมพันธ์กับส่วนกลางของสันเขาซึ่งเกิดขึ้นระหว่างการก่อตัวของสันหลังการเกิดขึ้น การก่อตัวของสันในการปลูกมันฝรั่งที่ปลูกโดยใช้เทคโนโลยีแบบดั้งเดิมทำให้มั่นใจได้ถึงการก่อตัวของต้นมันฝรั่งโดยมีความเบี่ยงเบนจากศูนย์กลาง 10 ถึง 15 ซม. (รูปที่ 22b) สิ่งนี้นำไปสู่การเปลี่ยนแปลงด้านเดียวในการเจริญเติบโตของส่วนที่เป็นพืชความไม่สม่ำเสมอในการก่อตัวและการพัฒนาของหัวใต้ดินและที่สำคัญที่สุดคือคุณภาพผลิตภัณฑ์ลดลงเนื่องจากรูปลักษณ์ภายนอก ปริมาณมากมันฝรั่งสีเขียว

ข้าว. 22. ปัญหาที่เป็นไปได้เมื่อ การก่อตัวของสันมันฝรั่ง (ทำงานโดยไม่มีระบบอัตโนมัติ): ก) การทำให้สันเขาแคบลง; b) การเบี่ยงเบนจากศูนย์กลาง
เมื่อใช้เทคโนโลยีการทำฟาร์มที่แม่นยำ ต้นมันฝรั่งจะตั้งอยู่ตรงกลางแถวโดยมีความเบี่ยงเบน 2.8 ถึง 3.5 ซม. การรวมกันของหน่วยสองรอบทั่วทั้งสนาม กล่าวคือ การปลูกและการก่อตัวของมันฝรั่งจะแสดงในตาราง 1 3.
ตารางที่ 3. ความถี่ของการเกิด (%) ของการเบี่ยงเบนของพืชมันฝรั่งจากศูนย์กลางของสันเขาในการทดลองของ Russian State Agrarian University-Moscow Agricultural Academy ตั้งชื่อตาม K. A. Timiryazev
การดำเนินการประมวลผลโดยใช้ระบบอัตโนมัติตามระบบ GPS พร้อมการแก้ไขสัญญาณแบบเรียลไทม์ แสดงให้เห็นความแม่นยำสูง ดังนั้นในระหว่างการไถ การเบี่ยงเบนที่สำคัญ (รูปที่ 23 ชื่อ L) มากกว่า 8 ซม. คิดเป็น 7% ของกรณี และระหว่างการไถพรวนขั้นต่ำ – 2% เมื่อปลูกตามเครื่องหมายและการก่อตัวของสันเขา การเบี่ยงเบนที่สำคัญจะเกิดขึ้นบ่อยกว่าใน 39 และ 26% ของกรณีตามลำดับ
ดังนั้นเมื่อทำงานกับพืชแถว ข้อกำหนดต่อไปนี้จึงถูกกำหนดให้กับระบบ GLONASS และวิธีการทางเทคนิคของการแนะนำ MTA อัตโนมัติ: การแนะนำหน่วยในสภาพสนามจริง เนื่องจากการทับซ้อนกันของการส่งผ่านหนึ่งไปยังอีกการส่งหนึ่ง จะต้องได้รับความแม่นยำในการเบี่ยงเบนของ แต่ละรอบไม่เกิน ± 4 ซม. สำหรับชิ้นส่วนที่ใช้งานใน 95% ของกรณี ปัจจุบันความถูกต้องนี้จัดทำโดย ระบบ GPSโดยใช้สถานีฐานเพิ่มเติม

ข้าว. 23. ภาพประกอบและแผนภาพแสดงการก่อตัวของสันในการปลูกมันฝรั่ง: L – ระยะห่างจากต้นถึงกึ่งกลางสันเขา
ควรสังเกตว่านอกเหนือจากระบบที่มีความแม่นยำสูงในการประมวลผลสัญญาณนำทางด้วยดาวเทียมแล้ว ระบบควบคุมรถแทรกเตอร์อัตโนมัติที่เหมาะสมยังมีความจำเป็น เนื่องจากไม่มีผู้ปฏิบัติงานคนใดสามารถให้ความแม่นยำในการเคลื่อนที่ที่ต้องการได้ด้วยตนเอง ตัวอย่างเช่น บริษัท John Deere กำลังติดตั้งระบบอัตโนมัติบนรถแทรกเตอร์ที่โรงงานของตนอยู่แล้ว มีระบบบังคับเลี้ยวอื่นๆ ที่ตอบสนองต่อสัญญาณนำทางที่เหมาะสม คุณสามารถติดตั้งเซอร์โวไดรฟ์บนส่วนควบคุมการบังคับเลี้ยวของรถแทรกเตอร์ ซึ่งจะควบคุมการเคลื่อนที่ของเครื่องจักรโดยอัตโนมัติด้วย อย่างไรก็ตามการติดตั้งเซอร์โวไดรฟ์บนแทรคเตอร์ MTZ-1221 แบบอนุกรมไม่ประสบความสำเร็จเนื่องจากพวงมาลัย "แน่น" มาก (แรงหมุนบนพวงมาลัย): ระบบอิเล็กทรอนิกส์มองว่าความพยายามนี้เป็นความพยายามของบุคคลที่จะเข้าควบคุมและปิดเครื่องโดยอัตโนมัติ ตอนนี้โรงงานรถแทรกเตอร์มินสค์ได้เริ่มผลิตรถแทรกเตอร์ด้วยระบบไฮดรอลิกที่ผลิตโดย Bosch (Sauer-Danfoss) และตอนนี้บางทีอาจเป็นไปได้ที่จะติดตั้งระบบบังคับเลี้ยวที่เหมาะสม
แนวโน้มในปัจจุบันก็คือว่าระบบขับเคลื่อนแบบขนานและระบบขับเคลื่อนอัตโนมัติเป็นอนาคตของการผลิตทางการเกษตรสมัยใหม่อย่างไม่ต้องสงสัย
คำถามทดสอบและการมอบหมายงาน
1. การขับขี่ยานยนต์แบบขนานและอัตโนมัติแตกต่างกันอย่างไร?
2. อุปกรณ์ใดบ้างที่จำเป็นในการดำเนินการขับขี่แบบขนานและอัตโนมัติ?
3. จุดประสงค์ของสถานี RTK คืออะไร?
4. ความแม่นยำที่ต้องการในการวางตำแหน่งอุปกรณ์เมื่อหว่านเมล็ดพืชคืออะไร?
5. ความแม่นยำของตำแหน่งสัมบูรณ์หมายถึงอะไร?
6. จำเป็นต้องมีบริการแก้ไขเพื่อวัตถุประสงค์อะไร?
ความสนใจ! นี่เป็นส่วนเบื้องต้นของหนังสือ
หากคุณชอบตอนเริ่มต้นของหนังสือแล้วล่ะก็ เวอร์ชันเต็มสามารถซื้อได้จากพันธมิตรของเรา - ผู้จัดจำหน่ายเนื้อหาทางกฎหมาย, LLC ลิตร