πρόοδος και υψηλής τεχνολογίαςδιευκολύνουν σημαντικά τη ζωή μας, στις πιο ποικίλες εκφάνσεις της, για παράδειγμα, στην καθημερινή ζωή, στις μεγάλες και μικρές βιομηχανίες, ακόμη και στη γεωργία. Και αν παλαιότερα η γεωργία γινόταν αποκλειστικά από ανθρώπινες και ζωικές δυνάμεις, σήμερα χρησιμοποιούνται ευρέως μια ποικιλία γεωργικών μηχανημάτων και εξοπλισμού υψηλής τεχνολογίας. Συγκεκριμένα, ένα παράδειγμα ενός τόσο χρήσιμου και, αναμφίβολα, εξοπλισμού υψηλής τεχνολογίας μπορεί να ονομαστεί πλοηγός τρακτέρ (σύστημα παράλληλης οδήγησης), το οποίο επιτρέπει στο μηχάνημα να κινείται κατά μήκος μιας προκαθορισμένης διαδρομής.
Τα πλεονεκτήματα της πλοήγησης για τρακτέρ είναι προφανή σε όλους όσους ξέρουν να μετρούν χρήματα και τους αρέσει να μοιράζουν σωστά και να αποταμιεύουν τα οικονομικά τους. Έτσι, για παράδειγμα, οι συσκευές πλοήγησης επιτρέπουν:
- Εξοικονομήστε καύσιμα και λιπαντικά.
- Βελτιστοποιήστε την κίνηση των οχημάτων εντός του χωραφιού και από το ένα πεδίο στο άλλο.
- Αυξήστε το φορτίο του εξοπλισμού κατά 2 ή και 3 φορές.
Ως αποτέλεσμα - μια σαφής εξοικονόμηση χρημάτων!
Το σύστημα παράλληλης οδήγησης είναι η εγκατάσταση ειδικής οπτικής οθόνης - ένδειξης πορείας, ελεγκτής και δέκτης GPS. Αυτό το σύστημασας επιτρέπει να θυμάστε την επιθυμητή πορεία, κατευθύνοντας το τρακτέρ παράλληλα σε μια προκαθορισμένη γραμμή. Ακολουθώντας την καθορισμένη τροχιά ή απόκλιση από αυτήν θα εμφανιστεί στην οθόνη.
Ταυτόχρονα, η πλοήγηση επιτρέπει όχι μόνο την ευθύγραμμη επεξεργασία του πεδίου, αλλά και την καμπυλόγραμμη, ελαχιστοποιώντας την πιθανότητα κενών μεταξύ γειτονικών σειρών. Εκείνοι. η σοδειά θα συγκομιστεί σχεδόν 100%.
Με βάση τα αποτελέσματα της εργασίας, ο οδηγός τρακτέρ θα λάβει μια πλήρη αναφορά που εμφανίζεται στην οθόνη.
Τι είδη πλοήγησης για τρακτέρ υπάρχουν;
Προς το παρόν, υπάρχουν δύο κύριοι τύποι πλοήγησης για τρακτέρ - αυτόματος πιλότος και παράλληλη οδήγηση.
Ο αυτόματος πιλότος σάς επιτρέπει να μειώσετε το φορτίο σε ένα άτομο (ο οδηγός τρακτέρ θα αναπτύξει μόνο τον εξοπλισμό). Επίσης, χάρη στον αυτόματο πιλότο, μπορείτε να εκτελέσετε εργασίες, για παράδειγμα, κατά τη διάρκεια κακής ορατότητας (ελαφριά βροχή, ομίχλη, ακόμη και τη νύχτα), γεγονός που αυξάνει σημαντικά την παραγωγικότητα της εργασίας και σας επιτρέπει να ξεκινήσετε οχήματα για 24ωρη εργασία (φυσικά , εφόσον το επιτρέπει ο σχεδιασμός του).
Ωστόσο, καθένα από τα συστήματα πλοήγησης στην αγορά διαφέρει σε ορισμένα χαρακτηριστικά και θα ήταν ωραίο να γνωρίζετε ποιες παραμέτρους πρέπει να προσέξετε και ποιες αποχρώσεις να λάβετε υπόψη κατά την αγορά τους.
Ποιοτική οθόνη
Η οθόνη είναι ένα από τα πιο σημαντικά στοιχεία του συστήματος παράλληλης οδήγησης, η ποιότητα του οποίου επηρεάζει άμεσα την άνεση της εργασίας.
Μια ποιοτική οθόνη πρέπει να είναι:
- Φωτεινό και με αντίθεση - οι πληροφορίες πρέπει να είναι ευανάγνωστες ακόμα και σε ηλιόλουστες καιρικές συνθήκες. Η ματ οθόνη δεν θα αστράφτει στον ήλιο. Είναι επίσης επιθυμητό η συσκευή να έχει λειτουργία ελέγχου της φωτεινότητας του οπίσθιου φωτισμού και νυχτερινή λειτουργία προκειμένου να μειωθεί το φορτίο στα μάτια του χειριστή του μηχανήματος.
- Μεγάλο και φαρδύ. Το να μπορείτε να βλέπετε περισσότερα είναι ο καλύτερος έλεγχος της παράλληλης οδήγησης.
- Δυνατό και προστατευμένο. Η θήκη πρέπει να προστατεύεται από την υγρασία και τη σκόνη και τα υλικά που χρησιμοποιούνται στη συσκευή πρέπει να είναι 100% υψηλής ποιότητας.
Λειτουργικότητα
Είναι σημαντικό όλα τα χειριστήρια να βρίσκονται όσο το δυνατόν πιο βολικά, απλά και ξεκάθαρα. Δώστε προσοχή στο μέγεθος των κουμπιών (μεγάλα ή μικρά), στη γλώσσα του μενού κ.λπ. Ο πλοηγός για το τρακτέρ πρέπει να συμμορφώνεται πλήρως με τη φράση "φτιαγμένο για ανθρώπους". Απαιτούνται τα ακόλουθα χαρακτηριστικά:
- Οδήγηση σε ευθεία γραμμή. Όλα είναι ξεκάθαρα εδώ - ισοπαλία γραμμή Α-Βκαι η συσκευή κατασκευάζει τις υπόλοιπες παράλληλες γραμμές οδήγησης.
- Δωρεάν λειτουργία οδήγησης. Το τρακτέρ μπορεί να οδηγηθεί σε κυρτή διαδρομή για πρώτη φορά, μετά την οποία η μονάδα θα σας ζητήσει να συνεχίσετε την οδήγηση, επαναλαμβάνοντας τη διαδρομή που μόλις διανύθηκε.
- Δυνατότητα "Συνέχεια" οποιασδήποτε ενότητας είναι αποθηκευμένη στη μνήμη της συσκευής.
- Δυνατότητα χειροκίνητης «Επεξεργασία πεδίων» με εισαγωγή επεξεργασμένων περιοχών, διαφόρων σημαδιών, μέτρησης επιφάνειας κ.λπ.
- Δυνατότητα προβολής ολοκληρωμένων εργασιών σε υπολογιστή.
Κεραία
Η ποιότητα του σήματος και, κατά συνέπεια, η ακρίβεια της εργασίας που εκτελείται εξαρτώνται από την κεραία. Είναι σημαντικό να καταλάβετε ότι ο "καταπληκτικός" πλοηγός με ενσωματωμένη κεραία, που σας προσφέρεται "σε ετοιμότητα" με έκπτωση, δεν θα είναι 99% ακριβής, επομένως μην εξοικονομείτε χρήματα και αγοράζετε συστήματα των οποίων το σφάλμα δεν υπερβαίνει το 0,5 μέτρα. Σε τέτοιες συσκευές, το σφάλμα στη γραμμή δεν θα είναι μεγαλύτερο από 15-20 cm.
Τιμή
Μια σημαντική παράμετρος, την οποία, δυστυχώς, καλύτερα να την εξερευνήσετε μόνοι σας. Ο πλοηγός πρέπει να έχει υψηλή ποιότητακαι μια προσιτή (κατά προτίμηση όχι υπερτιμημένη) τιμή, γι' αυτό σας συνιστούμε να μελετήσετε προσεκτικά την αγορά και να βγάλετε τα συμπεράσματά σας.
Μια μικρή περίληψη
Γενικά, αν συγκρίνετε τα αποτελέσματα των πεδίων επεξεργασίας με και χωρίς πλοηγό, μπορείτε να δείτε ξεκάθαρα την εξοικονόμηση χρημάτων. Συνήθως, κατά την επεξεργασία ενός χωραφιού με τυπικό τρόποπερίπου το 5% των καλλιεργειών παραλείπονται από εξωτερικά ορόσημα. Ταυτόχρονα, περίπου το 10% υποβάλλεται σε διπλή επεξεργασία. Εκείνοι. Οι μη επεξεργασμένες καλλιέργειες τελικά πεθαίνουν, αλλά η επανεπεξεργασία μπορεί να καταστρέψει μέρος της καλλιέργειας (ανάλογα με τον τύπο των ουσιών) ή να προκαλέσει υπερβολική κατανάλωση λιπασμάτων.
Οποιοσδήποτε εγγράμματος αγρότης θα σας πει ότι η αγορά ακριβού εξοπλισμού δεν είναι επικερδής εάν τον οδηγείτε τυχαία, γι' αυτό σας συνιστούμε να χρησιμοποιήσετε πλοήγηση GPS στα χωράφια και να απολαύσετε τα οφέλη όσον αφορά την εξοικονόμηση καυσίμων και λιπαντικών, καθώς και τη βελτιστοποίηση της κίνησης του τρακτέρ μέσα το χωράφι ή από το ένα πεδίο στο άλλο.άλλο.
Σχετικά με τα οφέλη της παράλληλης οδήγησης
Ας ρίξουμε μια πιο προσεκτική ματιά στο πώς, πού και πόσο αποτελεσματικά να το χρησιμοποιήσετε συστήματα παράλληλης οδήγησης. Το κύριο καθήκον της χρήσης είναι εξαιρετικά απλό - επιτρέπουν σε ένα τρακτέρ με τοποθετημένο εργαλείο να περάσει από το χωράφι έτσι ώστε κάθε επόμενη λωρίδα να είναι ακριβώς κατά μήκος της άκρης της προηγούμενηςαποφεύγοντας κενά και επικαλύψεις. Προχωρώντας ομαλά στο γήπεδο - εξοικονομείτε πολλά χρήματα.
Οποιοσδήποτε οδηγός τρακτέρ, ακόμα και ο πιο έμπειρος, δεν θα μπορεί να λειτουργήσει χωρίς ελαττώματα. Και το λάθος του κάθε χειριστή είναι είτε ακαλλιέργητη γη, είτε γη που έχει καλλιεργηθεί δύο φορές. Στην πρώτη περίπτωση, θα αναπτυχθούν ζιζάνια που συνθλίβουν τις γειτονικές σειρές, μειώνοντας την ποιότητα της καλλιέργειας. Στο δεύτερο: δεν πρόκειται για δικαιολογημένη υπερβολική δαπάνη σπόρων και λιπασμάτων.
Στην πραγματικότητα, το σχέδιο επεξεργασίας πεδίου μοιάζει με αυτό:
Πώς να εξασφαλίσετε μια ομαλή τροχιά κίνησης στο πεδίο του τρακτέρ σας;- εμπιστευτείτε τον χειριστή του μηχανήματος και το οξυδερκές μάτι του.
- Προσλάβετε έναν σηματοδότη και στείλτε τον να τρέξει στο γήπεδο και να βάλει ορόσημα για να προσανατολίσει τον χειριστή του μηχανήματος.
- χρησιμοποιήστε δείκτες αφρού.
- χρησιμοποιήστε συστήματα παράλληλης οδήγησης που βασίζονται στη λήψη συντεταγμένων δορυφορικά συστήματα GLONASS/GPS.
1. Η ικανότητα του χειριστή του μηχανήματος.
Κάθε φάρμα έχει εξαιρετικούς οδηγούς τρακτέρ. Αξιόπιστοι, που δεν πίνουν, αληθινοί επαγγελματίες. Πρώτον, τέτοιοι άνθρωποι είναι η εξαίρεση παρά ο κανόνας. Δεύτερον, κανείς δεν ακύρωσε τον περιβόητο «ανθρώπινο παράγοντα». Προβλήματα στο σπίτι, κακή διάθεση, δεν είδα, δεν πρόσεξα, αποσπάστηκε η προσοχή. Κανείς δεν ακύρωσε τις καιρικές συνθήκες, κανείς δεν ακύρωσε δουλειά μόνο κατά τις ώρες της ημέρας.
2. Πρόσληψη σηματοδοτών.
Φυσικά, οι σηματοδότες θα διευκολύνουν το έργο του χειριστή του μηχανήματος, γιατί έχει κατευθυντήρια γραμμή κίνησης. Ταυτόχρονα, πρέπει να βρεθούν οι σηματοδότες, να πληρωθούν μισθοί, επιπλέον, το πρόβλημα της εργασίας σε συνθήκες κακής ορατότητας δεν λύνεται, συν, και πάλι, υπάρχει μεγάλη πιθανότητα σφάλματος οδηγού τρακτέρ που σχετίζεται με το ίδιο "ανθρώπινος παράγοντας".
3. Χρήση μαρκαδόρων αφρού.
Αρκετά υψηλή ακρίβεια, η πιθανότητα λάθους μειώνεται σημαντικά. Το κύριο μειονέκτημα είναι η αστάθεια των δεικτών σε τέτοια φυσικά φαινόμενα όπως ο άνεμος, η βροχή. Πολλοί αγρότες σημειώνουν επίσης το γεγονός ότι σε ζεστό καιρό το αφρώδες υλικό χάνει τις ιδιότητές του πολύ γρήγορα και ο δείκτης γίνεται σχεδόν αόρατος. Το θέμα της εργασίας σε συνθήκες κακής ορατότητας παραμένει άλυτο. Επίσης, μην ξεχνάτε το υψηλό κόστος των δεικτών αφρού.
4. Χρήση συστημάτων παράλληλης οδήγησης.
Η χρήση της ναυσιπλοΐας στη γεωργία δεν αποτελεί έκπληξη. Σχεδόν κάθε αγρότης έχει στο οπλοστάσιό του συστήματα παράλληλης οδήγησης και δεν θα επιστρέψει ποτέ στις προηγούμενες τρεις μεθόδους. Γιατί;
- η ικανότητα εργασίας με ανεπαρκή ορατότητα (τη νύχτα, σε ομίχλη, σκόνη).
- σας επιτρέπει να εγκαταλείψετε εντελώς τους σηματοδότες και τη χρήση δεικτών.
- μειώνει την κατανάλωση υλικού σπόρων, καυσίμων και λιπαντικών και ορυκτών λιπασμάτων·
- ο χρόνος εκτέλεσης της εργασίας μειώνεται·
- η κόπωση μειώνεται, η απόδοση του χειριστή του μηχανήματος αυξάνεται.
- τη δυνατότητα υπολογισμού του εμβαδού.
Όλα αυτά θα επιτρέψουν:
- μειώστε τις επικαλύψεις έως και 10%, επομένως, αποφύγετε την υπερβολική δαπάνη υλικού σπόρων, καυσίμων και λιπαντικών και ορυκτών λιπασμάτων.
- αύξηση της παραγωγικότητας κατά βάρδιες κατά 20%
- αύξηση των ωρών εργασίας κατά 100% δουλεύοντας τη νύχτα
Πώς λειτουργεί το σύστημα παράλληλης οδήγησης
Το σύστημα παράλληλης οδήγησης βασίζεται στη λήψη δορυφορικών σημάτων GPS/GLONASS. Οι κύριοι τομείς εφαρμογής είναι: όργωμα, σπορά δημητριακών και σειρών, καλλιέργεια μεταξύ σειρών, ψεκασμός και διασπορά λιπασμάτων για ακριβή προσανατολισμό της μηχανής κατά τη διάρκεια της διαδρομής εργασίας.

Πως δουλεύει:
- Τοποθετείται στο τρακτέρ (μόνο ένας αναπτήρας αρκεί για αυτό) και η κεραία είναι συνδεδεμένη. Για σταθερή λειτουργίαΠρέπει να μεταφερθεί στην οροφή.
- Ο πλοηγός λαμβάνει δεδομένα από δορυφόρους, καθώς και διαφοροποιημένες διορθώσεις από σταθμούς βάσης.
- Ο χειριστής του μηχανήματος, όντας στην άκρη του γηπέδου, σημειώνει το σημείο Α, περνά την αποκοπή, σημειώνει το σημείο Β. Ο δείκτης πορείας θέτει παράλληλες γραμμές, σύμφωνα με μια δεδομένη τροχιά.
- Σε περίπτωση σφάλματος από τον χειριστή του μηχανήματος (επικάλυψη), η κλίμακα διόδου του πλοηγού μετατοπίζεται προς το ελάττωμα και η επικάλυψη χαράσσεται στην οθόνη.
- Μετά την ολοκλήρωση της εργασίας, ο γεωπόνος μπορεί να ελέγξει την ποιότητα της εργασίας ανεβάζοντας τα δεδομένα στον υπολογιστή.
Τρόποι επεξεργασίας πεδίου:

- 1 - Η κίνηση "Τυπική λειτουργία" γίνεται παράλληλα με τη γραμμή βάσης AB.
- 2 - "Adaptive curve" κάθε επόμενος δίσκος επαναλαμβάνει την προηγούμενη.
- 3 - "Παρόμοια καμπύλη" όλοι οι επόμενοι δίσκοι επαναλαμβάνουν την αρχική καμπύλη AB.
- 4 - Προεπεξεργασία των ζωνών στροφής κατά μήκος του περιγράμματος του χωραφιού (αυτή είναι η γραμμή 1-2, δείτε το σχήμα), ακολουθούμενη από επεξεργασία του πεδίου με στυλό παράλληλα με τη γραμμή βάσης (αυτή είναι η γραμμή 3-4, δείτε το σχήμα).
Στη γεωργία, τρεις κατηγορίες συσκευών ελέγχου κίνησης τρακτέρ και συνδυασμού GPS έχουν γίνει ευρέως διαδεδομένες και αποδεδειγμένα αποτελεσματικές: συστήματα παράλληλης διεύθυνσης και προωθητές αυτόματου πιλότου.
Η χρήση διαστημικών συστημάτων πλοήγησης καθίσταται δυνατή μετά την εγκατάσταση ειδικού δέκτη στο όχημα, ο οποίος λαμβάνει συνεχώς σήματα σχετικά με τη θέση των δορυφόρων πλοήγησης και τις αποστάσεις από αυτούς. Ανάλογα με την απαιτούμενη ακρίβεια, ο έλεγχος αυτού του εξοπλισμού πραγματοποιείται από τον χειριστή του μηχανήματος χειροκίνητα σύμφωνα με τα σημάδια στην οθόνη ενδείξεων ή με χρήση προωθητή ή αυτόματου πιλότου.
Το σύστημα παράλληλης οδήγησης είναι το πιο οπτικό και γρήγορο μέρος της τεχνολογίας γεωργίας ακριβείας, που έχει σχεδιαστεί για εργασίες πεδίου και είναι πιο αποτελεσματικό όταν χρησιμοποιείται με εξοπλισμό ευρείας κοπής.
Σύστημα παράλληλης οδήγησης- αυτή είναι η ενεργή συμμετοχή του χειριστή του μηχανήματος στον έλεγχο του μηχανήματος σύμφωνα με το σχήμα "μέτρηση των τρεχουσών συντεταγμένων του αγροτικού μηχανήματος - εμφάνιση αποκλίσεων από τη δεδομένη διαδρομή στον πίνακα αποτελεσμάτων στην καμπίνα - περιστροφή του τιμονιού από το μηχάνημα χειριστή να διατηρήσει τη μονάδα στη δεδομένη διαδρομή».
Δυστυχώς, η ψυχοκινητική αντίδραση του μέσου ανθρώπου δεν επιτρέπει την παράλληλη οδήγηση με αποκλίσεις μικρότερες από ± 30 cm, κάτι που αντιστοιχεί επίσης στην ακρίβεια ενός δέκτη GPS που βασίζεται μόνο στους συνήθεις 24 δορυφόρους. Γενικά τα περισσότερα απλό σύστημαΗ παράλληλη οδήγηση αποτελείται από δέκτη GPS με εξωτερική κεραία και ένδειξη κατεύθυνσης. Τα συστήματα εγκαθίστανται εύκολα και γρήγορα σε τρακτέρ ή σε συνδυασμό. Απαιτείται μόνο σύνδεση ρεύματος και εγκατάσταση εξωτερικής μονάδας (δέκτης GPS). Η εκπαίδευση των χειριστών μηχανών για εργασία με αυτό το είδος εξοπλισμού, ανάλογα με το επιθυμητό «βάθος» μελέτης, κυμαίνεται από αρκετά λεπτά έως μία ημέρα.
Πρέπει να σημειωθεί ότι η χρήση συσκευών παράλληλης οδήγησης με ακρίβεια ±30 cm του εργαλείου είναι πολύ περιορισμένη και χρησιμοποιείται κυρίως μόνο για γονιμοποίηση. Για όργωμα, σπορά, φυτοπροστασία, συγκομιδή και μια σειρά άλλων εργασιών απαιτείται μεγαλύτερη ακρίβεια της μονάδας. Ο εξοπλισμός για πιο ακριβή συστήματα παράλληλης οδήγησης περιλαμβάνει:
Δέκτης πλοήγησης με ακρίβεια εντοπισμού θέσης έως 10 cm, ικανός να λειτουργεί σε δύο συχνότητες.
- οθόνη ή πίνακας LED.
Ελεγκτής για τον υπολογισμό των αποκλίσεων στις ανωμαλίες της κεραίας του δέκτη και τη διόρθωση της κατεύθυνσης κίνησης.
Συσκευή ώθησης.
Υπάρχουν διάφοροι συνήθεις τρόποι για τη διόρθωση των σημάτων δορυφορικής πλοήγησης για την επίτευξη υψηλής ακρίβειας. Οι διορθώσεις μπορούν να ληφθούν τόσο από γεωστατικούς δορυφόρους, οι οποίοι θα αυξήσουν την ακρίβεια έως και ±10 cm, όσο και από τον δορυφορικό σταθμό βάσης RTK που βρίσκεται σε κοντινή απόσταση από το πεδίο.
Αρχή και συστήματα αυτόματης οδήγησης (αυτόματος πιλότος).
Ο αυτόματος πιλότος διαφέρει από την παράλληλη οδήγηση στο ότι οι αποκλίσεις από μια δεδομένη τροχιά που δημιουργείται από έναν δέκτη GPS και έναν ελεγκτή πλοήγησης εισάγονται απευθείας στο υδραυλικό σύστημα ελέγχου του οχήματος του τρακτέρ μέσω ειδικών συσκευών (βαλβίδα ελέγχου), εξαλείφοντας την αδράνεια και το παιχνίδι του τιμονιού. Επιπλέον, ένας ειδικός αισθητήρας γωνίας τροχού είναι εγκατεστημένος στο τρακτέρ. Ένα τέτοιο σύστημα παρέχει μέγιστη ακρίβεια (απόκλιση ± 2 cm) κίνησης κατά μήκος της διαδρομής χωρίς την παρέμβαση του χειριστή του μηχανήματος.
Το κύριο πλεονέκτημα της χρήσης συστημάτων παράλληλης οδήγησης είναι η μείωση των σφαλμάτων (ελαχιστοποίηση του ανθρώπινου παράγοντα) κατά την επεξεργασία πεδίων. Η πρακτική δείχνει ότι όταν ψεκάζονται οι καλλιέργειες με τον παραδοσιακό τρόπο, οι περισσότεροι χειριστές προτιμούν να περνούν γειτονικές σειρές με επικάλυψη για να αποφύγουν παραλείψεις. Ως αποτέλεσμα, η αμοιβαία επικάλυψη των σειρών, ακόμη και με τη χρήση μαρκαδόρων αφρού, είναι τουλάχιστον 5%. Η χρήση δεικτών πορείας με προωθητήρες μειώνει την επικάλυψη σε 2 ... 3% ή λιγότερο.
Δέκτηςυποστηρίζει διάφορες επιλογές για διορθώσεις GPS, συμπεριλαμβανομένων των WAAD, OmniSTAR. Η χρήση αυτών των διορθώσεων καθιστά δυνατή τη διασφάλιση της ακρίβειας περασμάτων έως και ±10 cm.
Πίνακαςδείχνει γραφικά την τρέχουσα θέση του οχήματος και παρέχει στον οδηγό πρόσθετες πληροφορίες όταν στρίβει ή οδηγεί σε κυρτές λωρίδες. Αυτή έχει γραφική οθόνημε δυνατότητα ανάγνωσης δεδομένων σε έντονο ηλιακό φως.
Υπολογιστής πεδίουμε λογισμικό - ένα σύστημα διαχείρισης δεδομένων πεδίου που χρησιμοποιούνται για πλοήγηση, αυτόματη οδήγηση, τήρηση αρχείων, επιτόπιες έρευνες, έρευνες περιοχής, εφαρμογές μεταβλητής μέτρησης.
Ελεγκτής,χρησιμοποιώντας δεδομένα από τον δέκτη GPS και τους εσωτερικούς αισθητήρες, που βρίσκονται σε ηρεμία και λειτουργούν σε 6 άξονες, μεταδίδει εντολές στο σύστημα ελέγχου.
Αισθητήρας γωνίας τροχούσχεδιασμένο για συνεχή ανατροφοδότησημε σύστημα ελέγχου τρακτέρ.
υδραυλική βαλβίδαλαμβάνει ηλεκτρικά σήματα από τον ελεγκτή και τα μετατρέπει σε υδραυλικά σήματα, τα οποία το σύστημα χρησιμοποιεί για να κρατήσει το όχημα στην πορεία του.
Ωθώνπαρέχει παράλληλη οδήγηση με ακρίβεια 10 cm.
Σταθμός βάσηςμεταδίδει διορθώσεις θέσης GPS στον δέκτη GPS του τρακτέρ μέσω ραδιοφώνου ή μόντεμ GSM για τον προσδιορισμό συντεταγμένων με υψηλή ακρίβεια (σφάλμα μικρότερο από ±2 cm).
Πιθανές επιλογές για τη θέση του εξοπλισμού στο τρακτέρ για παράλληλη οδήγηση και αυτόματο πιλότο.
Το ελάχιστο σετ για παράλληλη οδήγηση με ακρίβεια ±30 cm περιλαμβάνει τα κύρια εξαρτήματα: πίνακα LED, κεραία, μαξιλαράκι στήριξης κεραίας, βάση στήριξης, σετ καλωδίων σύνδεσης, λογισμικόκαι οδηγίες χρήσης.
Αυτός ο εξοπλισμός είναι σε ζήτηση λόγω του γεγονότος ότι παρέχει εξοικονόμηση κόστους. Για παράδειγμα, στην Ευρώπη, το οικονομικό αποτέλεσμα της χρήσης του εξοπλισμού GPS στη γεωργία φτάνει τα 50...60 ευρώ ανά στρέμμα.
Παρεμπιπτόντως, η συμβατική δορυφορική πλοήγηση, που χρησιμοποιείται ευρέως στις οδικές μεταφορές, μπορεί να δώσει μέγιστη ακρίβεια περίπου 2 m, κάτι που είναι απαράδεκτο για τις τεχνολογίες γεωργίας ακριβείας. Όσον αφορά τα συστήματα πλοήγησης, υπάρχουν έννοιες απόλυτης και σχετικής ακρίβειας. Η απόλυτη ακρίβεια είναι οι πραγματικές συντεταγμένες που χρησιμοποιούνται για τον προσδιορισμό της θέσης ενός αντικειμένου, όπως ενός κτιρίου, ενός αυτοκινήτου, ενός τρακτέρ ή ενός συνδυασμού. Για συστήματα γεωργίας ακριβείας, μπορείτε να περιοριστείτε στη σχετική ακρίβεια, δηλαδή στην τρέχουσα θέση ενός αντικειμένου, για παράδειγμα, σε σχέση με το πρώτο πέρασμα, στο αυτή τη στιγμήχρόνος. Ανάλογα με τον εξοπλισμό που χρησιμοποιείται, η σχετική ακρίβεια θα πρέπει να φτάνει σε τιμές της τάξης των 2,5 ... 30 cm.
Υπάρχουν επί του παρόντος πολλές υπηρεσίες διόρθωσης σε λειτουργία σε όλο τον κόσμο, αλλά σε Ρωσική Ομοσπονδίαλειτουργεί μόνο ένα - Omnistar HP/XP. Η υπηρεσία λειτουργεί ως εξής: Η Omnistar έχει το δικό της δίκτυο σταθμών βάσης που βρίσκονται σε όλο τον κόσμο. Είναι μέσα αυτόματη λειτουργίαυπολογίζεται η απαραίτητη διόρθωση σήματος και στη συνέχεια η διόρθωση μεταδίδεται μέσω γεωστατικών δορυφόρων σε συγκεκριμένο δέκτη GPS.
Εκτός από τις διαφορικές διορθώσεις, χρησιμοποιείται ευρέως η λειτουργία RTK, στην οποία το αγρόκτημα έχει το δικό του σταθερό ή φορητό σταθμός βάσης, και οι διορθώσεις στους δέκτες αποστέλλονται από αυτό με ραδιοφωνικό σήμα συχνότητας 450 ή 900 MHz. Ταυτόχρονα, δεν είναι απαραίτητο να αγοράσετε μια συνδρομή για κάθε δέκτη, επιτυγχάνεται μια αρκετά υψηλή σχετική ακρίβεια τοποθέτησης, αλλά, από την άλλη πλευρά, απαιτούνται σημαντικές εφάπαξ δαπάνες για την αγορά και εγκατάσταση εξοπλισμού. Επιπλέον, υπάρχει περιορισμός στην περιοχή δράσης, λόγω των χαρακτηριστικών του σήματος. Έτσι, για έναν σταθερό σταθμό βάσης, αυτός ο περιορισμός είναι ένας κύκλος με ακτίνα 11 km, στο κέντρο του οποίου βρίσκεται ο σταθμός βάσης, για έναν φορητό - λίγο λιγότερο. Στο εξωτερικό, αρκετές εκμεταλλεύσεις συγχωνεύουν τα RTK τους για να μειώσουν το συνολικό κόστος και την πληρέστερη κάλυψη πεδίου, ενώ το σήμα μπορεί επίσης να μεταπωληθεί.
Δεδομένου ότι η ακρίβεια της οδήγησης εξαρτάται άμεσα από την ακρίβεια των μετρήσεων του δέκτη GPS, είναι πολύ σημαντικό για τους χειριστές των μηχανών να γνωρίζουν τις βασικές αρχές των δεκτών. Η ακρίβεια του εντοπισμού θέσης επηρεάζεται από διάφορους κύριους παράγοντες: χρονικές αναντιστοιχίες, αριθμός δορυφόρων που παρατηρούνται ταυτόχρονα, ατμοσφαιρικές παρεμβολές, διακυμάνσεις στις τροχιές των δορυφόρων, διάδοση σήματος πολλαπλών διαδρομών κ.λπ.
Τα συστήματα παράλληλης διεύθυνσης και αυτόματου πιλότου βοηθούν στην ακριβή διατήρηση της απόστασης μεταξύ των διαδρόμων των μηχανών κατά την εκτέλεση εργασιών πεδίου. Κατά τη χρήση τους, πραγματοποιούνται τεχνολογικές εργασίες με ελάχιστη επικάλυψη, εξοικονομώντας χρόνο εργασίας και μηχανής, καύσιμα και λιπαντικά, σπόρους, λιπάσματα και φυτοπροστατευτικά προϊόντα. Η πλοήγηση είναι πολύ βολική για ψεκασμό, που γίνεται καλύτερα τη νύχτα όταν η θερμοκρασία του αέρα είναι χαμηλότερη και δεν έχει αέρα. Έτσι, τα πλεονεκτήματα των συστημάτων παράλληλης οδήγησης είναι:
Η ακρίβεια της κίνησης των μονάδων κατά μήκος των διαδρόμων.
Μείωση του φορτίου στον οδηγό τρακτέρ (οδηγό).
Δυνατότητα εργασίας τη νύχτα και σε συνθήκες κακής ορατότητας.
Για να γίνει αυτό, τα συστήματα παράλληλης οδήγησης διαθέτουν ειδική διεπαφή που διευκολύνει πολύ την εργασία.
Η κίνηση μπορεί να πραγματοποιηθεί τόσο σε ευθείες όσο και σε καμπύλες διαδρομές, ωστόσο, η ακρίβεια της καθοδήγησης, ειδικά όταν εργάζεστε με ρυμουλκούμενες μονάδες, είναι μεγαλύτερη όταν οδηγείτε σε ευθείες γραμμές.
V. I. Balabanov, A. I. Belenkov, E. V. Berezovsky, V. V. Egorov, S. V. Zhelezova
Εγχειρίδιο: «Τεχνολογίες πλοήγησης στη γεωργία».
Fields of the Trans-Urals №7 (129) ΑΥΓΟΥΣΤΟΣ 2015
Τρέχουσα σελίδα: 2 (το σύνολο του βιβλίου έχει 7 σελίδες) [προσβάσιμο απόσπασμα ανάγνωσης: 2 σελίδες]
Η ξένη και εγχώρια εμπειρία δείχνει την υψηλή απόδοση των τεχνολογιών γεωργίας ακριβείας, ειδικά σε σχέση με μεγάλες εκμεταλλεύσεις. Για παράδειγμα, σύμφωνα με τα διαθέσιμα στατιστικά στοιχεία, ήδη το 2006, περισσότερο από το 80% των αγροτών των ΗΠΑ χρησιμοποιούσαν τεχνολογίες γεωργίας ακριβείας στον έναν ή τον άλλον βαθμό, χάρη στις οποίες κατάφεραν να αυξήσουν τις αποδόσεις των σιτηρών στα 90 centners ανά εκτάριο. Ταυτόχρονα, διαπιστώθηκε ότι το κόστος εφαρμογής της γεωργίας ακριβείας αποδίδει μετά από 2-4 χρόνια χρήσης της και αρχίζει να αποφέρει σημαντικά κέρδη.
Επί του παρόντος, η γεωργία ακριβείας γίνεται πιο διαδεδομένη σε πολλές χώρες, συμπεριλαμβανομένης της Ρωσίας. Ταυτόχρονα, η έρευνα στον τομέα της γεωργίας ακριβείας τα τελευταία 15 χρόνια έχει δείξει ότι αυτή η κατεύθυνση είναι πολυεπιστημονική. Για την ανάπτυξή του και την ευρεία εισαγωγή του στην παραγωγή, θα απαιτηθεί πολύ περισσότερος χρόνος και οικονομικοί πόροι από ό,τι για τη χρήση παραδοσιακών τεχνολογιών.
Ελέγξτε τις ερωτήσεις και τις εργασίες
1. Πότε και πού προέκυψε η έννοια της «καλλιέργειας ακριβείας»;
2. Σε ποια γεωργικά μηχανήματα και ποιες μάρκες χρησιμοποιήθηκαν για πρώτη φορά ηλεκτρονικά συστήματα;
3. Ποιες εργασίες στον τομέα της γεωργίας ακριβείας έγιναν στη Σοβιετική Ένωση και σε άλλες σοσιαλιστικές χώρες;
4. Πότε και πού εμφανίστηκαν τα πρώτα μηχανήματα σποράς ακριβείας;
5. Ποια εταιρεία ήταν η πρώτη που τοποθέτησε εξοπλισμό πλοήγησης στον εξοπλισμό της;
6. Σε ποιες χώρες είναι περισσότερο ανεπτυγμένες σήμερα οι τεχνολογίες γεωργίας ακριβείας;
3. Συστήματα παράλληλης και αυτόματης οδήγησης
Στη γεωργία, τρεις κατηγορίες συσκευών ελέγχου κίνησης τρακτέρ και συνδυασμού GPS έχουν γίνει ευρέως διαδεδομένες και αποδεδειγμένα αποτελεσματικές: συστήματα παράλληλης διεύθυνσης και προωθητές αυτόματου πιλότου. Η χρήση διαστημικών συστημάτων πλοήγησης καθίσταται δυνατή μετά την εγκατάσταση ειδικού δέκτη στο όχημα, ο οποίος λαμβάνει συνεχώς σήματα σχετικά με τη θέση των δορυφόρων πλοήγησης και τις αποστάσεις από αυτούς. Ανάλογα με την απαιτούμενη ακρίβεια, ο έλεγχος αυτού του εξοπλισμού πραγματοποιείται από τον χειριστή του μηχανήματος χειροκίνητα σύμφωνα με τα σημάδια στην οθόνη ενδείξεων ή με χρήση προωθητή ή αυτόματου πιλότου.
Το σύστημα παράλληλης οδήγησης είναι το πιο οπτικό και γρήγορο μέρος της τεχνολογίας γεωργίας ακριβείας, που έχει σχεδιαστεί για εργασίες πεδίου και είναι πιο αποτελεσματικό όταν χρησιμοποιείται με εξοπλισμό ευρείας κοπής.
Σύστημα παράλληλης οδήγησης- αυτή είναι η ενεργή συμμετοχή του χειριστή του μηχανήματος στον έλεγχο του μηχανήματος σύμφωνα με το σχήμα "μέτρηση των τρεχουσών συντεταγμένων του αγροτικού μηχανήματος - εμφάνιση αποκλίσεων από τη δεδομένη διαδρομή στον πίνακα αποτελεσμάτων στην καμπίνα - περιστροφή του τιμονιού από το μηχάνημα χειριστή για να κρατήσει τη μονάδα στη δεδομένη διαδρομή» (Εικ. 3).
Ρύζι. 3. Η αρχή λειτουργίας της συσκευής
Δυστυχώς, η ψυχοκινητική αντίδραση του μέσου ανθρώπου δεν επιτρέπει την παράλληλη οδήγηση με αποκλίσεις μικρότερες από ± 30 cm, κάτι που αντιστοιχεί επίσης στην ακρίβεια ενός δέκτη GPS που βασίζεται μόνο στους συνήθεις 24 δορυφόρους. Γενικά, το απλούστερο σύστημα παράλληλου συστήματος διεύθυνσης αποτελείται από έναν δέκτη GPS με εξωτερική κεραία και ένδειξη κατεύθυνσης. Τα συστήματα εγκαθίστανται εύκολα και γρήγορα σε τρακτέρ ή σε συνδυασμό. Απαιτείται μόνο σύνδεση ρεύματος και εγκατάσταση εξωτερικής μονάδας (δέκτης GPS). Η εκπαίδευση των χειριστών μηχανών για εργασία με αυτό το είδος εξοπλισμού, ανάλογα με το επιθυμητό «βάθος» μελέτης, κυμαίνεται από αρκετά λεπτά έως μία ημέρα.
Πρέπει να σημειωθεί ότι η χρήση συσκευών παράλληλης οδήγησης με ακρίβεια ±30 cm του εργαλείου είναι πολύ περιορισμένη και χρησιμοποιείται κυρίως μόνο για γονιμοποίηση. Για όργωμα, σπορά, φυτοπροστασία, συγκομιδή και μια σειρά άλλων εργασιών απαιτείται μεγαλύτερη ακρίβεια της μονάδας. Ο εξοπλισμός για πιο ακριβή συστήματα παράλληλης οδήγησης περιλαμβάνει:
δέκτης πλοήγησης με ακρίβεια εντοπισμού θέσης έως 10 cm, ικανός να λειτουργεί σε δύο συχνότητες (Εικ. 4).
οθόνη (εικ. 5) ή πίνακας LED (εικ. 6).
ελεγκτής για τον υπολογισμό των αποκλίσεων στις ανωμαλίες της κεραίας του δέκτη και τη διόρθωση της κατεύθυνσης κίνησης (Εικ. 7).
προωθητής (Εικ. 10).
Υπάρχουν διάφοροι συνήθεις τρόποι για τη διόρθωση των σημάτων δορυφορικής πλοήγησης για την επίτευξη υψηλής ακρίβειας. Διορθώσεις μπορούν να ληφθούν τόσο από γεωστατικούς δορυφόρους, οι οποίοι θα αυξήσουν την ακρίβεια έως και ±10 cm, όσο και από τον δορυφορικό σταθμό βάσης RTK (Εικ. 10), που βρίσκεται σε άμεση γειτνίαση με το πεδίο.
Αρχή και συστήματα αυτόματης οδήγησης (αυτόματος πιλότος). Ο αυτόματος πιλότος διαφέρει από την παράλληλη οδήγηση στο ότι οι αποκλίσεις από μια δεδομένη τροχιά που δημιουργείται από έναν δέκτη GPS και έναν ελεγκτή πλοήγησης εισάγονται απευθείας στο υδραυλικό σύστημα ελέγχου του οχήματος του τρακτέρ μέσω ειδικών συσκευών (βαλβίδα ελέγχου) (Εικ. 9), εξαλείφοντας την αδράνεια και το σύστημα διεύθυνσης παίζω. Επιπλέον, ένας ειδικός αισθητήρας γωνίας τροχού είναι εγκατεστημένος στο τρακτέρ (Εικ. 8). Ένα τέτοιο σύστημα παρέχει μέγιστη ακρίβεια (απόκλιση ± 2 cm) κίνησης κατά μήκος της διαδρομής χωρίς την παρέμβαση του χειριστή του μηχανήματος.
Το κύριο πλεονέκτημα της χρήσης συστημάτων παράλληλης οδήγησης είναι η μείωση των σφαλμάτων (ελαχιστοποίηση του ανθρώπινου παράγοντα) κατά την επεξεργασία πεδίων. Η πρακτική δείχνει ότι όταν ψεκάζονται οι καλλιέργειες με τον παραδοσιακό τρόπο, οι περισσότεροι χειριστές προτιμούν να περνούν γειτονικές σειρές με επικάλυψη για να αποφύγουν παραλείψεις. Ως αποτέλεσμα, η αμοιβαία επικάλυψη των σειρών, ακόμη και με τη χρήση μαρκαδόρων αφρού, είναι τουλάχιστον 5%. Η χρήση δεικτών πορείας με προωθητήρες μειώνει την επικάλυψη σε 2 ... 3% ή λιγότερο.

Ρύζι. 4. Δέκτης AgGPS 252
Ο δέκτης υποστηρίζει διάφορες επιλογές για διορθώσεις GPS, συμπεριλαμβανομένων των WAAD, OmniSTAR. Η χρήση αυτών των διορθώσεων καθιστά δυνατή τη διασφάλιση της ακρίβειας περασμάτων έως και ±10 cm.

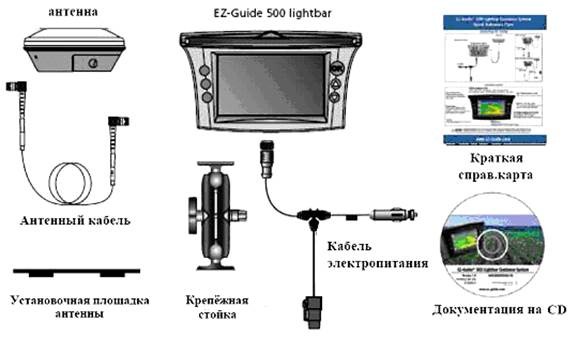
Ρύζι. 5. AgGPS EZ-GUIDE PLUS ή EZ-GUIDE 500 LED Bar
Ο πίνακας δείχνει γραφικά την τρέχουσα θέση του οχήματος και παρέχει στον οδηγό πρόσθετες πληροφορίες όταν στρίβει ή οδηγεί σε κυρτές λωρίδες. Διαθέτει οθόνη γραφικών που μπορεί να διαβαστεί σε έντονο ηλιακό φως.
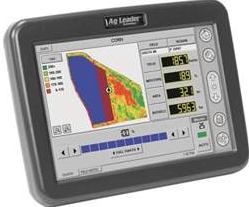
Ρύζι. 6. Υπολογιστής πεδίου Insight με λογισμικό
Υπολογιστής πεδίου με λογισμικό - ένα σύστημα διαχείρισης δεδομένων πεδίου που χρησιμοποιούνται για πλοήγηση, αυτόματο σύστημα διεύθυνσης, τήρηση αρχείων, επιτόπιες έρευνες, έρευνες περιοχής, εφαρμογές μεταβλητής μέτρησης.

Ρύζι. 7. Ελεγκτής AgGPS NAVCONTROLLER II
Ο ελεγκτής, χρησιμοποιώντας δεδομένα από τον δέκτη GPS και τους εσωτερικούς αισθητήρες που βρίσκονται σε ηρεμία και λειτουργούν σε 6 άξονες, μεταδίδει εντολές στο σύστημα ελέγχου.

Ρύζι. 8 - Αισθητήρας γωνίας τροχού
Ο αισθητήρας γωνίας τροχού έχει σχεδιαστεί για συνεχή ανάδραση με το σύστημα ελέγχου τρακτέρ.
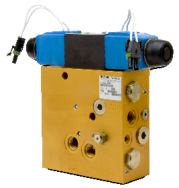
Ρύζι. 9 - Βαλβίδα ελέγχου
Η υδραυλική βαλβίδα λαμβάνει ηλεκτρικά σήματα από τον ελεγκτή και τα μετατρέπει σε υδραυλικά σήματα, τα οποία το σύστημα χρησιμοποιεί για να κρατήσει το όχημα στην πορεία του.
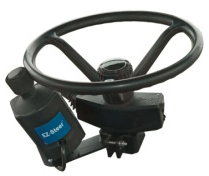
Ρύζι. 10 - Προωστήρας
Ο προωθητής παρέχει παράλληλη οδήγηση με ακρίβεια 10 cm.
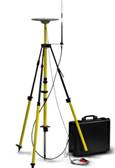
Ρύζι. 11 - Σταθμός βάσης (RTK)
Ο σταθμός βάσης μεταδίδει διορθώσεις θέσης GPS στον δέκτη GPS του τρακτέρ μέσω ραδιοφώνου ή μόντεμ GSM για τον προσδιορισμό των συντεταγμένων με υψηλή ακρίβεια (σφάλμα μικρότερο από ±2 cm).
Πιθανές επιλογές για τη θέση του εξοπλισμού στο τρακτέρ για παράλληλη οδήγηση και αυτόματο πιλότο φαίνονται στην εικ. 12.
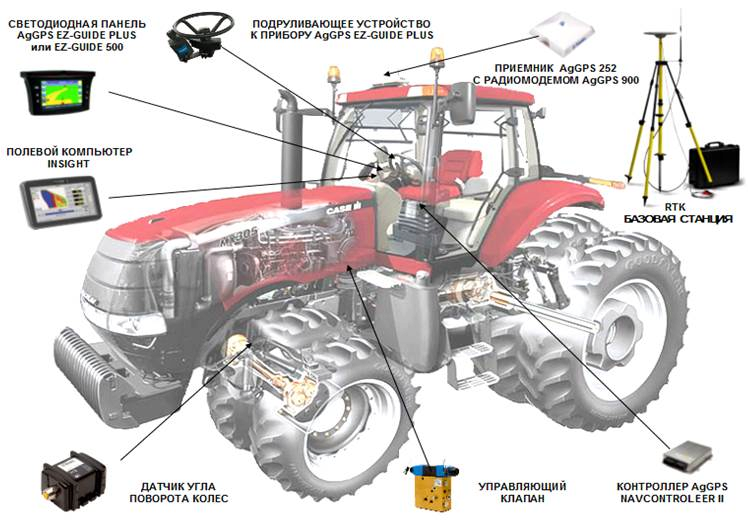
Ρύζι. 12. Θέση εξοπλισμού για παράλληλη και αυτόματη οδήγηση σε τρακτέρ (εικόνα από http://www.trimble.com/agriculture/autopilot.aspx)
Το ελάχιστο σετ για παράλληλη οδήγηση με ακρίβεια ±30 cm φαίνεται στο σχ. 13. Τα κύρια εξαρτήματά του είναι: πίνακας LED, κεραία, μαξιλαράκι στήριξης κεραίας, στύλος στήριξης, σετ καλωδίων σύνδεσης, λογισμικό και οδηγίες χρήσης.
Αυτός ο εξοπλισμός είναι σε ζήτηση λόγω του γεγονότος ότι παρέχει εξοικονόμηση κόστους. Για παράδειγμα, στην Ευρώπη, το οικονομικό αποτέλεσμα της χρήσης του εξοπλισμού GPS στη γεωργία φτάνει τα 50...60 ευρώ ανά στρέμμα.
Παρεμπιπτόντως, η συμβατική δορυφορική πλοήγηση, που χρησιμοποιείται ευρέως στις οδικές μεταφορές, μπορεί να δώσει μέγιστη ακρίβεια περίπου 2 m, κάτι που είναι απαράδεκτο για τις τεχνολογίες γεωργίας ακριβείας. Όσον αφορά τα συστήματα πλοήγησης, υπάρχουν έννοιες απόλυτης και σχετικής ακρίβειας. Η απόλυτη ακρίβεια είναι οι πραγματικές συντεταγμένες που χρησιμοποιούνται για τον προσδιορισμό της θέσης ενός αντικειμένου, όπως ενός κτιρίου, ενός αυτοκινήτου, ενός τρακτέρ ή ενός συνδυασμού. Για συστήματα γεωργίας ακριβείας, μπορεί κανείς να περιοριστεί στη σχετική ακρίβεια, δηλ. στην τρέχουσα θέση ενός αντικειμένου, για παράδειγμα, σε σχέση με το πρώτο πέρασμα, σε μια δεδομένη στιγμή. Ανάλογα με τον εξοπλισμό που χρησιμοποιείται, η σχετική ακρίβεια θα πρέπει να φτάνει σε τιμές της τάξης των 2,5 ... 30 cm.
Ρύζι. 13. Τυπικά εξαρτήματα συστήματος
Επί του παρόντος, υπάρχουν πολλές υπηρεσίες διόρθωσης στον κόσμο, αλλά μόνο μία λειτουργεί στη Ρωσική Ομοσπονδία - η Omnistar HP/XP. Η υπηρεσία λειτουργεί ως εξής: Η Omnistar έχει το δικό της δίκτυο σταθμών βάσης που βρίσκονται σε όλο τον κόσμο. Υπολογίζουν αυτόματα την απαραίτητη διόρθωση σήματος και στη συνέχεια μεταδίδουν τη διόρθωση σε συγκεκριμένο δέκτη GPS μέσω γεωστατικών δορυφόρων.
Εκτός από τις διαφορικές διορθώσεις, χρησιμοποιείται ευρέως η λειτουργία RTK, στην οποία βρίσκεται ένας σταθερός ή φορητός σταθμός βάσης στο αγρόκτημα και οι διορθώσεις στους δέκτες αποστέλλονται από αυτό με ραδιοφωνικό σήμα συχνότητας 450 ή 900 MHz. Ταυτόχρονα, δεν είναι απαραίτητο να αγοράσετε μια συνδρομή για κάθε δέκτη, επιτυγχάνεται μια αρκετά υψηλή σχετική ακρίβεια τοποθέτησης, αλλά, από την άλλη πλευρά, απαιτούνται σημαντικές εφάπαξ δαπάνες για την αγορά και εγκατάσταση εξοπλισμού. Επιπλέον, υπάρχει περιορισμός στην περιοχή δράσης, λόγω των χαρακτηριστικών του σήματος. Έτσι, για έναν σταθερό σταθμό βάσης, αυτός ο περιορισμός είναι ένας κύκλος με ακτίνα 11 km, στο κέντρο του οποίου βρίσκεται ο σταθμός βάσης, για έναν φορητό είναι λίγο λιγότερος. Στο εξωτερικό, αρκετές εκμεταλλεύσεις συγχωνεύουν τα RTK τους για να μειώσουν το συνολικό κόστος και την πληρέστερη κάλυψη πεδίου, ενώ το σήμα μπορεί επίσης να μεταπωληθεί.
Δεδομένου ότι η ακρίβεια της οδήγησης εξαρτάται άμεσα από την ακρίβεια των μετρήσεων του δέκτη GPS, είναι πολύ σημαντικό για τους χειριστές των μηχανών να γνωρίζουν τις βασικές αρχές των δεκτών. Η ακρίβεια του εντοπισμού θέσης επηρεάζεται από διάφορους κύριους παράγοντες: χρονικές αναντιστοιχίες, αριθμός δορυφόρων που παρατηρούνται ταυτόχρονα, ατμοσφαιρικές παρεμβολές, διακυμάνσεις στις τροχιές των δορυφόρων, διάδοση σήματος πολλαπλών διαδρομών κ.λπ.
Τα συστήματα παράλληλης διεύθυνσης και αυτόματου πιλότου βοηθούν στην ακριβή διατήρηση της απόστασης μεταξύ των διαδρόμων των μηχανών κατά την εκτέλεση εργασιών πεδίου. Κατά τη χρήση τους, πραγματοποιούνται τεχνολογικές εργασίες με ελάχιστη επικάλυψη, εξοικονομώντας χρόνο εργασίας και μηχανής, καύσιμα και λιπαντικά, σπόρους, λιπάσματα και φυτοπροστατευτικά προϊόντα. Η πλοήγηση είναι πολύ βολική για ψεκασμό, που γίνεται καλύτερα τη νύχτα όταν η θερμοκρασία του αέρα είναι χαμηλότερη και δεν έχει αέρα. Έτσι, τα πλεονεκτήματα των συστημάτων παράλληλης οδήγησης είναι:
την ακρίβεια της κίνησης των μονάδων κατά μήκος των διαδρόμων·
μείωση του φορτίου στον οδηγό τρακτέρ (οδηγό).
την ικανότητα εργασίας τη νύχτα και σε συνθήκες κακής ορατότητας.
Για να γίνει αυτό, τα συστήματα παράλληλης οδήγησης (Εικ. 14) διαθέτουν ειδική διεπαφή που διευκολύνει πολύ την εργασία.
Η κίνηση μπορεί να πραγματοποιηθεί τόσο σε ευθείες όσο και σε καμπύλες διαδρομές (Εικ. 15), ωστόσο, η ακρίβεια της καθοδήγησης, ειδικά όταν εργάζεστε με ρυμουλκούμενες μονάδες, είναι μεγαλύτερη όταν κινείστε κατά μήκος ευθειών.

Ρύζι. δεκατέσσερα. συσκευή πλοήγησης EZ-Guide 500 Lightbar για αυτόματο πιλότο σε δράση

Ρύζι. 15. Πιθανή τροχιά κίνησης αδρανών (εικόνα από τον ιστότοπο http://www.geomir.ru/ag_navigation_ru)
Οι δοκιμές του συστήματος πλοήγησης στη Ρωσία, που διεξήχθησαν από το Geomir Center το 2004 στις εγκαταστάσεις της Inteko-Agro LLC στην περιοχή Belgorod, έδειξαν ότι η εγκατάσταση του συστήματος σε ένα απροετοίμαστο τρακτέρ John Deere διαρκεί περίπου 10 λεπτά.
Μια ομάδα χειριστών μηχανών 12 ατόμων που δεν είχαν προηγουμένως εργαστεί με το σύστημα παράλληλης οδήγησης καλλιέργησαν το χωράφι με έναν καλλιεργητή Horsh (18,3 m) σε δύο περάσματα μήκους περίπου 800 m, ενώ το σφάλμα στην απόσταση μεταξύ των σειρών ήταν 25 cm. Η διόρθωση δορυφόρου VBS χρησιμοποιήθηκε Omnistar. Τα συστήματα παράλληλης οδήγησης και οι αυτόματοι πιλότοι έχουν ένα χαρακτηριστικό. Η «καρδιά» αυτών των συστημάτων, ο δέκτης GPS, ανήκει στον τύπο των αισθητήρων, η εισαγωγή και πώληση των οποίων στη Ρωσία ελέγχεται αυστηρά από το κράτος. Επομένως, η νόμιμη εφαρμογή τους είναι δυνατή μόνο μετά από πιστοποίηση και αδειοδότηση. Για ορισμένα συστήματα, αυτές οι διαδικασίες έχουν ήδη πραγματοποιηθεί και επιτρέπονται προς πώληση.
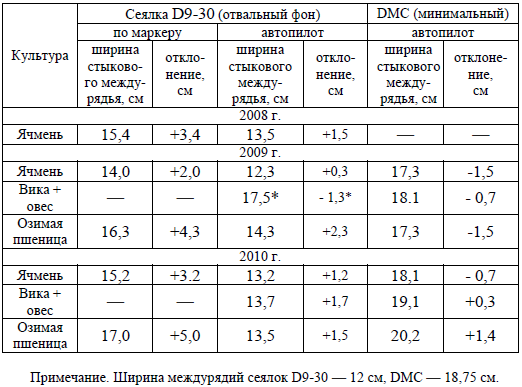
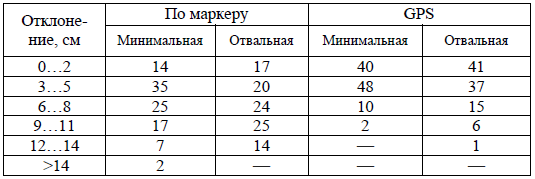
Στον πίνακα. Το 1 παρουσιάζει τα δεδομένα τριετών μελετών της απόστασης των σειρών πισινών κατά τη σπορά διαφόρων καλλιεργειών με δείκτη και τη χρήση του συστήματος αυτόματου πιλότου (Εικ. 16, 17) στη Γεωργική Ακαδημία Timiryazev της Μόσχας.
Πίνακας 1. Τιμές εμβολιασμού και αποκλίσεων από την προτύπωση της στάθμης του σποράς

Ρύζι. 16. Άποψη της απόστασης των γραμμών του κοντακίου κατά τη σπορά με δείκτη

Ρύζι. 17. Άποψη της απόστασης των σειρών του άκρου κατά τη σπορά σε αυτόματο πιλότο
Η σπορά των σιτηρών (χειμερινό σιτάρι και κριθάρι) έγινε στη μία περίπτωση με αυτόματο πιλότο, στην άλλη με δείκτη. Ταυτόχρονα, η σπορά του χειμερινού σιταριού και κριθαριού στο φόντο του καλουπιού πραγματοποιήθηκε από ένα συνηθισμένο σπαρτικό D9-30 Amazone (εφεξής καλούμενο D-9-30) χρησιμοποιώντας το σύστημα Autopilot και έναν δείκτη. Σύμφωνα με την παραλλαγή μηδέν (χωρίς όργωμα) και ελάχιστης άροσης, η σπορά πραγματοποιήθηκε με πνευματικό σπορέα απευθείας σποράς DMC Primera-3000 Amazone, (εφεξής θα αναφέρεται ως DMC) μόνο με χρήση αυτόματου πιλότου. Η σπορά του μείγματος βίκου-βρώμης πραγματοποιήθηκε με δύο σπαρτήρες: D9-30 στο όργωμα, DMC στη μηδενική παραλλαγή μόνο με τη χρήση αυτόματου πιλότου.
Κατά τη διάρκεια της έρευνας, παρατηρήθηκε άνισο πλάτος των αποστάσεων μεταξύ των παρακείμενων περασμάτων των σπαρτικών κατά τη σπορά σιτηρών και μίγματος βίκου-βρώμης με δείκτη και αυτόματο πιλότο. Έτσι, το 2008, το κριθάρι σπάρθηκε με σπαρτήρα D9-30 σύμφωνα με την παραλλαγή της όργωσης με καλουπώματα. Ταυτόχρονα, αποκλίσεις της απόστασης των σειρών πισινών από την τυπική απόσταση των σειρών που προβλέπεται από το σχέδιο του σπαρτήρα στην περίπτωση σποράς κριθαριού σε δείκτη 3,4 cm, χρησιμοποιώντας αυτόματο πιλότο - 1,5 cm.
Παρά τις σχετικά καλές μέσες τιμές των αποκλίσεων (0,63 και 2,98 cm στην πρώτη επανάληψη και 1,59 και 2,68 cm στη δεύτερη, αντίστοιχα), η σπορά κριθαριού με δείκτη (Εικ. 16) έδειξε μεγαλύτερη απόκλιση στις παραμέτρους της σειράς πισινών απόσταση - από +13,75 εκ. έως -9,0 εκ. Μια τέτοια κακή ευθυγράμμιση της απόστασης των σειρών μπορεί να έχει αρνητικό αποτέλεσμα, ειδικά όταν καλλιεργούνται σειρές. Κατά τη χρήση του συστήματος Autopilot, δεν παρατηρήθηκαν τέτοιες σημαντικές αποκλίσεις (Εικ. 17). Όσον αφορά τη λειτουργία του αυτόματου πιλότου στο καλούπι και το ελάχιστο υπόβαθρο, οι αποκλίσεις στο τελευταίο είναι λιγότερο σημαντικές, καθώς ο ελκυστήρας είναι ευκολότερος να ελεγχθεί σε πιο πυκνό έδαφος.
Είναι απαραίτητο να σημειωθεί ένα ακόμη σημαντικό πλεονέκτημα του συστήματος Autopilot σε σύγκριση με τον δείκτη. Όταν εργάζεστε σε ένα σύστημα χωρίς άροση, το κομμάτι από τον δείκτη, ειδικά το σούρουπο, δεν είναι πολύ ορατό. Ο "Αυτόματος πιλότος" σας επιτρέπει να εργάζεστε όλο το εικοσιτετράωρο. Αυτή η περίσταση από μόνη της μπορεί να αυξήσει σημαντικά την απόδοση της εργασίας στη γεωργία: δύο χειριστές μηχανών μπορούν να εργάζονται με τη σειρά τους σε ένα τρακτέρ χωρίς διάλειμμα 24 ώρες την ημέρα και να πραγματοποιούν σπορά με τους συντομότερους και καλύτερους αγροτεχνικούς όρους (Εικ. 18).
Το 2010, οι αποκλίσεις στο πλάτος των αποστάσεων των άκρων για μεμονωμένες καλλιέργειες εκδηλώθηκαν ως εξής. Στο χειμερινό σιτάρι, όταν σπάρθηκε με όργωμα με καλούπια D9-30, η απόσταση μεταξύ γειτονικών περασμάτων του σπαρτήρα ήταν 5 εκ., στο κριθάρι - 3,2 εκ. Κατά τη σπορά με αυτόματο πιλότο, τα αποτελέσματα ήταν 1,5 και 1,2 εκ. αντίστοιχα. Για τον βίκο με βρώμη, αυτή η τιμή ήταν 1,7 εκ. Οι αποκλίσεις κατά τη σπορά αυτών των καλλιεργειών με σπορέα DMC χρησιμοποιώντας σύστημα GPS ήταν: για το χειμερινό σιτάρι - 1,4 cm. κριθάρι - 0,7 cm; βίκος με βρώμη -0,3 εκ. Με απόσταση σειρών του σπαρτήρα 18,8 εκ., αυτές οι αποκλίσεις είναι αρκετά αποδεκτές.

Ρύζι. 18. Εργασία τη νύχτα με χρήση του συστήματος Autopilot
Στις καλλιέργειες σε σειρά, εκτός από την ακριβή φύτευση, απαιτείται καλλιέργεια μεταξύ των σειρών. Επομένως, όταν χρησιμοποιείτε συστήματα πλοήγησης, απαιτείται υψηλή ακρίβεια της μονάδας.
Κατά τη διάρκεια των πειραμάτων, έγινε προσπάθεια προσαρμογής του συστήματος «Αυτόματος πιλότος» για την επεξεργασία μεταξύ των σειρών πατάτας. Επιλέχθηκε μια θέση σε μια πλαγιά για πατάτες για να δυσκολέψει το έργο του αυτόματου πιλότου (Εικ. 19). Οι τροχιές που περνούσε η πατατοζαρντινιέρα φορτώθηκαν στον υπολογιστή του συστήματος «Αυτόματος πιλότος» στην εργασία για τον διαμορφωτή κρεβατιού (Εικ. 20).
Ο αυτόματος πιλότος αντιμετώπισε εύκολα τέτοια καθήκοντα που θα ήταν πολύ δύσκολο για έναν απλό χειριστή του μηχανήματος, καθώς το τρακτέρ σύρθηκε στην πλαγιά. Το σύστημα Autopilot ήταν σε θέση να κατευθύνει ένα τρακτέρ που κινούνταν σχεδόν πλάγια. Ως αποτέλεσμα, τέλεια ευθείες κορυφογραμμές και φιλικοί επόμενοι βλαστοί ακόμη και σε κλίση (Εικ. 21).

Ρύζι. 19. Φύτευση πατάτας σε πλαγιά με χρήση του συστήματος Autopilot

Ρύζι. 20. Σχηματισμός κορυφογραμμής πατάτας με χρήση του συστήματος Autopilot

Ρύζι. 21. Ιδανικά ευθείες κορυφογραμμές και σπορόφυτα πατάτας (η φύτευση και ο σχηματισμός κορυφογραμμών έγιναν με αυτόματο πιλότο)
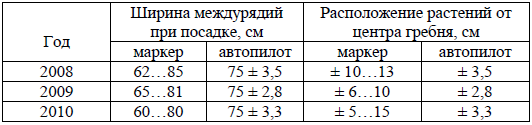
Η φύτευση πατάτας διεξήχθη από φυτευτή πατάτας GL-34T χρησιμοποιώντας αυτόματο πιλότο και δείκτη (βλ. Εικ. 19). Η καθορισμένη τροχιά κίνησης της μονάδας, με τη χρήση του συστήματος GPS, επαναλήφθηκε στην παραλλαγή της καλλιέργειας ακριβείας κατά τον σχηματισμό κορυφογραμμής των δενδρυλλίων πατάτας. Σύμφωνα με την παραδοσιακή τεχνολογία της καλλιέργειας πατάτας, αυτή η τεχνική γινόταν οπτικά, δηλαδή η κίνηση της μονάδας ελεγχόταν από χειριστή μηχανής. Η απόσταση των σειρών μεταξύ των διαδρόμων του φυτευτή πατάτας κατά τη χρήση μαρκαδόρου και αυτόματου πιλότου διέφερε ελαφρώς σε μεμονωμένα έτη, με μέσο όρο, σύμφωνα με την παραδοσιακή τεχνολογία, ένα διάστημα από 60…65 έως 80…85 cm, δηλαδή την απόκλιση από την τυπική γλάστρα Η απόσταση των σειρών (75 cm) ήταν από - 15 έως +10 cm. Η χρήση του συστήματος "Autopilot" παρείχε απόκλιση από την ευθύτητα των παρακείμενων σειρών από 2,8 έως 3,0 cm (Πίνακας 2).
Πίνακας 2. Το πλάτος της απόστασης των σειρών του κοντακίου και η θέση των φυτών πατάτας στην κορυφογραμμή με διαφορετικές τεχνολογίες καλλιέργειας
Μια σημαντική προϋπόθεση για την ανάπτυξη ενός πλήρους φυτού πατάτας είναι η θέση του σε σχέση με το κεντρικό τμήμα της κορυφογραμμής, το οποίο σχηματίζεται κατά το σχηματισμό της κορυφογραμμής μετά τη βλάστηση. Ο σχηματισμός κορυφογραμμών σε φυτείες πατάτας που καλλιεργήθηκαν σύμφωνα με την παραδοσιακή τεχνολογία εξασφάλιζε τον σχηματισμό φυτών πατάτας με αποκλίσεις από το κέντρο από 10 έως 15 cm (Εικ. 22β). Αυτό οδήγησε σε μονομερή αλλαγή στην ανάπτυξη του βλαστικού τμήματος, ανομοιόμορφο σχηματισμό και ανάπτυξη υπόγειων κονδύλων και το πιο σημαντικό, μείωση της ποιότητας του προϊόντος λόγω της εμφάνισης ένας μεγάλος αριθμόςπράσινες πατάτες.

Ρύζι. 22. Πιθανά προβλήματαόταν οι πατάτες σχηματίζουν κορυφογραμμές (εργάζονται χωρίς αυτόματο πιλότο): α) στένωση της κορυφογραμμής. β) εκτός κέντρου
Κατά τη χρήση τεχνολογίας καλλιέργειας ακριβείας, τα φυτά πατάτας βρίσκονταν στο κέντρο της σειράς με απόκλιση από 2,8 έως 3,5 cm. 3.
Πίνακας 3. Συχνότητα εμφάνισης (%) των αποκλίσεων των φυτών πατάτας από το κέντρο της κορυφογραμμής στο πείραμα του Ρωσικού Κρατικού Αγροτικού Πανεπιστημίου-Γεωπονικής Ακαδημίας της Μόσχας με το όνομα K. A. Timiryazev
Η διεξαγωγή θεραπειών με χρήση αυτόματου πιλότου που βασίζεται σε GPS, με διόρθωση σήματος σε πραγματικό χρόνο, δείχνει υψηλή ακρίβεια. Έτσι, στο όργωμα, οι κρίσιμες αποκλίσεις (Εικ. 23, χαρακτηρισμός L) πάνω από 8 cm αντιστοιχούσαν στο 7% των περιπτώσεων, στην ελάχιστη άροση - 2%. Κατά την προσγείωση στον δείκτη και τον σχηματισμό οπτικής κορυφογραμμής, οι κρίσιμες αποκλίσεις είναι πιο συχνές, αντίστοιχα στο 39 και στο 26% των περιπτώσεων.
Έτσι, όταν εργάζεστε με καλλιέργειες σειρών, επιβάλλονται οι ακόλουθες απαιτήσεις στο σύστημα GLONASS και στα τεχνικά μέσα αυτόματης καθοδήγησης του MTA: η καθοδήγηση αδρανών σε πραγματικές συνθήκες αγρού λόγω της επιβολής μιας μεταβίβασης σε άλλη πρέπει να επιτυγχάνει ακρίβεια αποκλίσεις κάθε διέλευσης που δεν υπερβαίνουν τα ±4 cm για τα σώματα εργασίας στο 95% των περιπτώσεων. Προς το παρόν, αυτή η ακρίβεια παρέχεται από Σύστημα GPSχρησιμοποιώντας έναν πρόσθετο σταθμό βάσης.

Ρύζι. 23. Απεικόνιση και διάγραμμα σχηματισμού κορυφογραμμών σε φυτείες πατάτας: L είναι η απόσταση από το φυτό μέχρι το κέντρο της κορυφογραμμής
Πρέπει να σημειωθεί ότι εκτός από ένα σύστημα επεξεργασίας σήματος δορυφορικής πλοήγησης υψηλής ακρίβειας, απαιτείται κατάλληλο αυτόματο σύστημα ελέγχου τρακτέρ, καθώς κανένας χειριστής μηχανής δεν είναι σε θέση να παρέχει χειροκίνητα την απαιτούμενη ακρίβεια κίνησης. Για παράδειγμα, η John Deere εγκαθιστά ήδη συστήματα Autopilot στα τρακτέρ της στα εργοστάσια. Υπάρχουν και άλλα συστήματα διεύθυνσης που ανταποκρίνονται στα κατάλληλα σήματα πλοήγησης. Μπορείτε να εγκαταστήσετε έναν σερβοκινητήρα στο τιμόνι του τρακτέρ, ο οποίος θα ελέγχει επίσης αυτόματα την κίνηση του μηχανήματος. Ωστόσο, η εγκατάσταση μιας τέτοιας μονάδας σερβομηχανισμού σε ένα σειριακό τρακτέρ MTZ-1221 δεν ήταν επιτυχής λόγω ενός πολύ «σφιχτού» τιμονιού (δύναμη περιστροφής στο τιμόνι): το ηλεκτρονικό σύστημα αντιλήφθηκε αυτή την προσπάθεια ως προσπάθεια ενός ατόμου να παίρνει τον έλεγχο "στον εαυτό του" και απενεργοποιείται αυτόματα. Τώρα το εργοστάσιο τρακτέρ του Μινσκ έχει ξεκινήσει την παραγωγή τρακτέρ με υδραυλικά που κατασκευάζονται από τη Bosch (Sauer-Danfoss) και τώρα, ίσως, θα είναι δυνατό να εξοπλιστούν με κατάλληλα συστήματα διεύθυνσης.
Η τάση σήμερα είναι τέτοια που αναμφίβολα τα συστήματα παράλληλης οδήγησης και οι αυτόματοι πιλότοι αποτελούν το μέλλον της σύγχρονης αγροτικής παραγωγής.
Ελέγξτε τις ερωτήσεις και τις εργασίες
1. Ποιες είναι οι διαφορές μεταξύ παράλληλης και αυτόματης οδήγησης εξοπλισμού αυτοκινήτου;
2. Τι εξοπλισμός χρειάζεται για την εφαρμογή παράλληλης και αυτόματης οδήγησης;
3. Ποιος είναι ο σκοπός του σταθμού RTK;
4. Ποια είναι η απαιτούμενη ακρίβεια τοποθέτησης του εξοπλισμού κατά τη σπορά σιτηρών;
5. Τι σημαίνει απόλυτη ακρίβεια τοποθέτησης;
6. Ποιος είναι ο σκοπός των διορθωτικών υπηρεσιών;
Προσοχή! Αυτή είναι μια εισαγωγική ενότητα του βιβλίου.
Αν σας άρεσε η αρχή του βιβλίου, τότε πλήρη έκδοσημπορεί να αγοραστεί από τον συνεργάτη μας - έναν διανομέα νομικού περιεχομένου LLC "LitRes".