Прогрес та високі технологіїістотно полегшують наше життя, у найрізноманітніших її проявах, наприклад, у побуті, на великих та малих виробництвах і навіть у сільському господарстві. І якщо раніше землеробство проводилося виключно силами людини та тварин, то сьогодні повсюдно використовуються різноманітні землеробські машини та високотехнологічне обладнання. Зокрема, прикладом такого корисного і, поза всяким сумнівом, високотехнологічного обладнання можна назвати навігатор для трактора (система паралельного водіння), що дозволяє машині рухатися за встановленим заздалегідь маршрутом.
Переваги навігації для тракторів очевидні всім тим, хто вміє рахувати гроші та любить грамотно розподіляти та економити свої фінанси. Так, наприклад, навігаційні прилади дозволяють:
- Економити паливо та ПММ.
- Оптимізувати рух техніки всередині поля та з одного поля на інше.
- Збільшити завантаження техніки у 2, а то й у 3 рази.
Як результат – очевидна економія коштів!
Система паралельного водіння є установкою спеціального візуального екрану – курсовказівника, контролера та приймача GPS. Ця системадозволяє запам'ятати необхідний курс, спрямовуючи трактор паралельно заздалегідь прокладеної лінії. Наслідування призначеної траєкторії або відхилення від неї відображатиметься на екрані.
У цьому навігація дозволяє проводити як прямолінійну обробку поля, а й криволінійну, мінімізуючи ймовірність виникнення перепусток між сусідніми рядками. Тобто. урожай буде зібрано практично на 100%.
За підсумками проведеної роботи, тракторист отримає повний звіт, виведений на монітор.
Які навігації для тракторів існують?
На даний момент існує два основних види навігації для тракторів – автопілот та система паралельного водіння.
Автопілот дозволяє знизити навантаження на людину (тракторист тільки розгортатиме техніку). Також завдяки автопілотуванню можна виконувати роботи, наприклад, під час поганої видимості (дрібного дощу, туману і навіть уночі), що суттєво підвищує продуктивність праці та дозволяє пускати транспорт для цілодобової роботи (звичайно, якщо дозволяє його конструкція).
Однак, кожна з представлених на ринку навігаційних систем відрізняється за тими чи іншими характеристиками і непогано було б дізнатися, на які параметри звертати увагу та які нюанси враховувати при їхньому придбанні.
Якісний дисплей
Дисплей є одним з найважливіших елементів системи паралельного водіння, від якості якого залежить зручність роботи.
Якісний дисплей має бути:
- Яскравим та контрастним – інформація має легко читатись навіть у сонячну погоду. Матовий екран не блищить на сонці. Також бажано наявність у девайсі функції керування яскравістю підсвічування та нічний режим, щоб знижувати навантаження на очі механізатора.
- Великим та широкоформатним. Можливість побачити більше – найкращий контроль паралельного водіння.
- Міцним та захищеним. Корпус повинен бути захищений від вологи та пилу, а матеріали, що використовуються у пристрої – 100% високої якості.
Функціональність
Важливо, щоб усі елементи управління були максимально зручно розташовані, прості та зрозумілі. Зверніть увагу на розмір кнопок (великі або дрібні), мову меню та ін. Навігатор для трактора повинен повністю відповідати фразі «зроблено для людей». Обов'язковою є наявність наступних функцій:
- Водіння «По прямій». Тут все зрозуміло – малюємо лінію А-Ві пристрій вибудовує решту паралельних прямих для водіння.
- Режим «Довільного водіння». Перша поїздка на тракторі може бути виконана по криволінійній траєкторії, після чого пристрій виведе підказки для продовження водіння, копіюючи траєкторію, якою щойно їхала техніка.
- Можливість «Продовжити» будь-яку ділянку, збережену в пам'яті приладу.
- Можливість ручного «Редагування полів» із вставкою оброблених ділянок, різних позначок, виміром площі та ін.
- Можливість переглядати виконані роботи на ПК.
Антена
Від антени залежить якість сигналу та відповідно точність виконання робіт. Важливо розуміти, що «дивовижний» навігатор із вбудованою антеною, пропонований вам «з рук» по знижці, в 99% не буде точним, тому не заощаджуйте та купуйте системи, похибка яких не перевищує 0,5 метра. У таких пристроях похибка на лінії становитиме не більше 15-20 см.
Ціна
Важливий параметр, який, на жаль, найкраще досліджувати самостійно. Навігатор повинен мати високою якістюта доступною (бажано не завищеною) ціною, тому рекомендуємо уважно вивчити ринок та самостійно зробити відповідні висновки.
Невелике підбиття підсумків
В цілому, якщо порівнювати результати обробки полів з навігатором і без нього, можна наочно побачити економію коштів. Зазвичай при обробці поля стандартним способомпо зовнішніх орієнтирах пропускається близько 5% посівів. При цьому близько 10% піддаються подвійній обробці. Тобто. необроблені посіви в результаті гинуть, а повторна обробка може зіпсувати частину врожаю (залежно від типу речовин) або дати перевитрату добрив.
Будь-який грамотний фермер скаже, що придбання дорогої техніки не рентабельно, якщо водити її абияк, тому рекомендуємо використовувати GPS-навігацію на полях і насолоджуватися отриманими перевагами у вигляді економії витрати пального та ПММ, а також оптимізації пересування трактора всередині поля або з одного поля на інше.
Про переваги паралельного водіння
Розгляньмо як, де і наскільки ефективно використовувати системи паралельного водіння. Головне завдання використання гранично просте – зробити можливим прохід трактора з навісним агрегатом по полю так, щоб кожна наступна смуга була рівно по краю попередньої, уникаючи перепустки та перекриття. Рухаючись по полю рівно - Ви заощаджуєте значні кошти.
Будь-який тракторист, навіть найдосвідченіший не зможе працювати без огріхів. А кожна помилка механізатора це або необроблена земля або земля оброблена двічі. У першому випадку зростатимуть бур'яни, які тиснуть сусідні рядки, знижуючи якість урожаю. У другому: це не обґрунтований перевитрата насіннєвого матеріалу та добрив.
Насправді малюнок обробки поля виглядає так:
Як забезпечити рівну траєкторію руху по полю Вашого трактора?- довіритися механізатору та його пильному оку;
- наймати сигнальника та відправляти його бігати по полю та ставити вішки, для орієнтування механізатора;
- використовувати пінні маркери;
- використовувати системи паралельного водіння на основі прийому координат супутникових системГЛОНАСС/GPS.
1.Майстерність механізатора.
У кожному господарстві є чудові трактористи. Надійні, не п'ють справжні професіонали. По-перше, такі люди скоріше виняток, ніж правило. По-друге, ніхто не скасовував горезвісний «людський фактор». Проблеми вдома, поганий настрій не побачив, не помітив, відволікся. Ніхто не скасовував погодні умови, ніхто не скасовував роботу лише у світлий час доби.
2.Прийом на роботу сигнальників.
Звичайно, сигнальники полегшать роботу механізатору, адже у нього з'являється орієнтир руху. При цьому сигнальників необхідно знайти, платити зарплату, на додачу до цього не вирішується проблема роботи в умовах поганої видимості, плюс знову ж таки велика ймовірність помилки тракториста, пов'язана з тим самим «людським фактором».
3.Використання пінних маркерів.
Досить висока точність значно знижується ймовірність помилки. Головним недоліком є нестійкість маркерів до таких природних явищ, як вітер, дощ. Багато фермерів відзначають і той факт, що за спекотної погоди пінний матеріал дуже швидко втрачає свої якості і маркер стає практично не видимим. Не вирішено залишається питання роботи в умовах поганої видимості. Також не варто забувати про високу вартість пінних маркерів.
4.Використання систем паралельного водіння.
Використанням навігації у сільському господарстві нікого не здивуєш. Майже кожен фермер має у своєму арсеналі системи паралельного водіння і ніколи не повернеться до попередніх трьох методів. Чому?
- можливість роботи при недостатній видимості (вночі, у тумані, пилу);
- дозволяє повністю відмовитися від сигнальників та використання маркерів;
- знижує витрату насіннєвого матеріалу, ПММ та мінеральних добрив;
- скорочується час виконання робіт;
- знижується стомлюваність, підвищується ефективність роботи механізатора;
- можливість підрахунку площ.
Все це дозволить:
- скоротити перекриття до 10%, отже уникнути перевитрати насіннєвого матеріалу, ПММ та мінеральних добрив.
- збільшити змінну продуктивність на 20%
- збільшити робочі часи на 100% за рахунок роботи вночі
Як працює система паралельного водіння
Система паралельного керування заснована на прийомі сигналів супутників GPS/ГЛОНАСС. Основними сферами застосування є: обробка ґрунтів, посів зернових та просапних культур, міжрядна культивація, обприскування та розкидання добрив для точного орієнтування машини під час робочого ходу.

Як це працює:
- На трактор встановлюється (для цього достатньо лише прикурювача) та підключається антена. Для стабільної роботиїї потрібно вивести на дах;
- Навігатор отримує дані із супутників, а також диференційовані поправки з базових станцій;
- Механізатор, перебуваючи на кромці поля, відзначає точку А, проходить гон, зазначає точку Б. Курсовказівник прокладає паралельні лінії, згідно з заданою траєкторією;
- У разі помилки механізатора (перекриття), діодна шкала навігатора зміщується у бік огріху, але в екрані перекриття штрихується;
- Після виконання роботи агроном може переглянути якість роботи, вивантаживши дані на комп'ютер.
Режими обробки поля:

- 1 - «Стандартний режим» рух відбувається паралельно до базової прямої АВ;
- 2 - «Адаптивна крива» кожна наступна загінка повторює попередню;
- 3 - «Ідентична крива» всі наступні загінки повторюють початкову криву АВ;
- 4 - Попередня обробка зон розворотів по контуру поля (це лінія 1-2 см. рисунок), з подальшою обробкою поля загінками, паралельними базовій прямій (це лінія 3-4 см. рисунок).
У сільському господарстві набули широкого поширення і довели свою ефективність три класи приладів для управління рухом тракторів та комбайнів, що використовують GPS-приймачі: системи паралельного водіння та підрулюючі пристрої для автопілотування.
Використання космічних навігаційних систем стає можливим після установки на транспортний засіб спеціального приймача, який постійно отримує сигнали про місцезнаходження навігаційних супутників і відстані до них. Залежно від необхідної точності керування такою технікою здійснюється механізатором вручну за показаннями мітки на екрані дисплея, або з використанням пристрою або автопілотування, що підрулює.
Система паралельного водіння є найнаочнішою та швидко окупною частиною технології точного землеробства, призначена для проведення польових робіт та найбільш ефективна в умовах застосування з широкозахватною технікою.
Система паралельного водіння- це активна участь механізатора в керуванні машиною за схемою «вимірювання поточних координат сільгоспмашини – відображення відхилень від заданого маршруту на табло в кабіні – обертання механізатором рульового колеса для утримання агрегату на заданому маршруті».
На жаль, психомоторна реакція середньої людини не дозволяє здійснювати паралельне водіння з відхиленнями менше ±30 см, що також відповідає точності GPS-приймача, що спирається тільки на звичайні 24 супутники. У випадку сама проста системапаралельного водіння складається з GPS-приймача із зовнішньою антеною та покажчика курсу. Системи легко та швидко встановлюються на трактор чи комбайн. Потрібне лише підключення до електроживлення та встановлення зовнішнього блоку (приймач GPS). Навчання механізаторів роботі з даним видом обладнання, залежно від бажаної «глибини» вивчення, становить від кількох хвилин до доби.
Необхідно відзначити, що використання приладів паралельного керування з точністю ведення агрегату ±30 см дуже обмежене і використовується в основному тільки на внесенні добрив. Для проведення ґрунтообробки, посіву, захисту рослин, збирання та низки інших операцій потрібна більш висока точність ведення агрегату. До складу обладнання для систем точнішого паралельного водіння входять:
Навігаційний приймач з точністю позиціонування – до 10 см, здатний працювати на двох частотах;
- дисплей або світлодіодна панель;
Контролер для розрахунку відхилень на нерівностях антени приймача та коригування напрямку руху;
Підрулюючий пристрій.
Існує кілька поширених способів коригування супутникових навігаційних сигналів для досягнення високої точності. Поправки можуть бути отримані від геостаціонарних супутників, що підвищить точність до ±10 см, так і від базової супутникової станції РТК, розташованої в безпосередній близькості від поля.
Принцип та системи автоматичного водіння (автопілот).
Автопілотування відрізняється від паралельного водіння тим, що відхилення від заданої траєкторії, що виробляються GPS-приймачем і навігаційним контролером, через спеціальні пристрої (керуючий клапан) вводяться безпосередньо в гідравлічну систему керування ходовою частиною трактора, виключаючи інертність та люфт кермового управління. На додаток до трактора встановлюється спеціальний датчик кута повороту коліс. Така система забезпечує максимальну точність (відхилення ±2 см) руху маршрутом без втручання механізатора.
Основна перевага використання систем паралельного керування - зменшення помилок (зведення до мінімуму людського фактора) при обробці полів. Практика показує, що при обприскуванні культур традиційним способом більшість операторів вважають за краще проходити сусідні ряди з перекриттям, щоб уникнути перепусток. У результаті взаємне перекриття рядів, навіть із використанням пінних маркерів, становить щонайменше 5 %. Застосування покажчиків курсу з пристроями, що підрулюють, знижує перекриття до 2…3 % і менше.
Приймачпідтримує різні варіанти для виправлень GPS, у т. ч. WAAD, OmniSTAR. Використання цих виправлень дозволяє забезпечити точність проходів до ±10 см.
Панельу графічному вигляді показує поточне положення транспортного засобу та забезпечує водія додатковою інформацією при розворотах або керуванні вигнутими рядами. Вона має графічний дисплейз можливістю зчитування даних за яскравого сонячного світла.
Польовий комп'ютерз програмним забезпеченням - система управління польовими даними, що використовуються для навігації, автоматичного водіння, ведення записів, польової зйомки, майданної зйомки, додатків із показниками, що змінюються.
Контролер,використовуючи дані від GPS-приймача та внутрішніх датчиків, що перебувають у стані спокою та працюють по 6 осях, передає команди для системи управління.
Датчик кута повороту коліспризначений для безперервної зворотнього зв'язкуіз системою управління трактором.
Гідравлічний клапанотримує електричні сигнали від контролера і перетворює їх на гідравлічні, які система використовує для утримання транспортного засобу на заданому курсі.
Підрулюючий пристрійзабезпечує паралельне керування з точністю до 10 см.
Базова станціяпередає поправки GPS-положення на приймач GPS трактора через радіо або GSM-модем для визначення координат з високою точністю (похибка менше ±2 см).
Можливі варіанти розташування обладнання на тракторі для паралельного водіння та автопілотування.
Мінімальний набір для паралельного водіння з точністю ±30 см включає основні компоненти: світлодіодна панель, антена, установча площадка антени, стійка кріплення, набір сполучних кабелів, програмне забезпеченнята інструкція щодо використання.
Дане обладнання затребуване у зв'язку з тим, що забезпечує економію коштів. Наприклад, у Європі економічний ефект від застосування GPS-обладнання у сільському господарстві сягає 50...60 євро на гектар.
До речі, звичайна супутникова навігація, що широко застосовується на автомобільному транспорті, може дати максимальну точність лише близько 2 м, що неприпустимо для технологій точного землеробства. Щодо систем навігації є поняття абсолютної та відносної точності. Абсолютна точність - це фактичні координати, з яких визначається місцезнаходження об'єкта, наприклад, будівлі, автомобіля, трактора чи комбайна. Для систем точного землеробства можна обмежитися відносною точністю, тобто поточним місцезнаходженням будь-якого об'єкта, наприклад, щодо першого проходу, Наразічасу. Залежно від обладнання, що використовується, відносна точність повинна досягати значень порядку 2,5...30 см.
Нині у світі діють кілька сервісів поправок, але у Російської Федераціїпрацює тільки один – Omnistar HP/XP. Сервіс працює таким чином: компанія Omnistar має власну мережу базових станцій, що розташовані по всьому світу. Вони в автоматичному режиміобчислюють необхідну корекцію сигналу, потім через геостаціонарні супутники передають поправку на конкретний GPS-приймач.
Додатково до диференціальних поправок широко застосовується режим RTK, у якому біля господарства розміщується своя стаціонарна чи переносна базова станція, і поправки на приймачі надсилаються із неї радіосигналом із частотою 450 чи 900 МГц. При цьому не потрібно купувати передплату на кожен приймач, досягається досить висока відносна точність позиціонування, але, з іншого боку, потрібні значні разові витрати на придбання та встановлення обладнання. До того ж існує обмеження площі дії, що обумовлюється характеристиками сигналу. Так, для стаціонарної базової станції це обмеження – коло радіусом 11 км, у центрі якого знаходиться базова станція, для переносної – трохи менше. За кордоном кілька господарств об'єднують свої RTK для зниження загальних витрат і повнішого перекриття полів, при цьому також може здійснюватися перепродаж сигналу.
Так як точність керування безпосередньо залежить від точності вимірювань GPS-приймача, то дуже важливе знання механізаторами основних принципів роботи приймачів. На точність позиціонування впливає кілька основних факторів: тимчасові неузгодженості, кількість супутників, що одночасно спостерігаються, атмосферна інтерференція, варіації орбіт супутників, багатопроменеве поширення сигналу та ін.
Системи паралельного водіння та автопілотування допомагають точно дотримуватись відстані між проходами машин при виконанні польових робіт. При їх використанні технологічні операції виконуються з мінімальними перекриттями, економляться робочий та машинний час, паливно-мастильні матеріали, насіння, добрива та засоби захисту рослин. Навігація дуже зручна для обприскування, яке краще проводити вночі, коли нижча температура повітря та відсутня вітер. Таким чином, перевагами систем паралельного водіння є:
Точність руху агрегатів по міжряддям;
зниження навантаження на тракториста (машиніста);
Можливість роботи у темний час доби та в умовах поганої видимості.
Для цього системи паралельного водіння мають спеціальний інтерфейс, що істотно полегшує роботу.
Рух може здійснюватися як по прямолінійних, так і по криволінійних траєкторіях, проте точність ведення, особливо при роботі з причіпними агрегатами, вища при русі прямими лініями.
В. І. Балабанов, А. І. Бєлєнков, Є. В. Березовський, В. В. Єгоров, С. В. Желєзова
Посібник: "Навігаційні технології у сільському господарстві".
Ниви Зауралля №7 (129) СЕРПЕНЬ 2015
Поточна сторінка: 2 (всього книга 7 сторінок) [доступний уривок для читання: 2 сторінок]
Зарубіжний та вітчизняний досвід показує високу ефективність технологій точного землеробства, особливо стосовно великих господарств. Наприклад, за наявними статистичними даними вже 2006 року понад 80% фермерів США тією чи іншою мірою застосовували технології точного землеробства, завдяки чому їм вдалося підвищити врожайність зернових культур до 90 ц/га. При цьому встановлено, що витрати на впровадження точного землеробства у них окупаються вже після 2-4 років його використання і починають приносити значний прибуток.
В даний час точне землеробство набуває все більшого поширення в багатьох країнах, у тому числі і в Росії. У той же час, дослідження в галузі точного землеробства за останні 15 років показали, що цей напрямок багатопрофільний. Для його розвитку та повсюдного впровадження у виробництво знадобиться набагато більше часу та фінансових засобів, ніж для застосування традиційних технологій.
Контрольні питання та завдання
1. Коли і де зародилося поняття «точне землеробство»?
2. На яких сільськогосподарських машинах та яких марок вперше застосовувалися електронні системи?
3. Які роботи в галузі точного землеробства проводились у Радянському Союзі та інших соціалістичних країнах?
4. Коли і де з'явилися перші машини для точного висіву насіння?
5. Яка фірма першою розмістила у своїй техніці навігаційне устаткування?
6. У яких країнах нині технології точного землеробства набули найбільшого розвитку?
3. Системи паралельного та автоматичного водіння
У сільському господарстві набули широкого поширення і довели свою ефективність три класи приладів для управління рухом тракторів та комбайнів, що використовують GPS-приймачі: системи паралельного водіння та підрулюючі пристрої для автопілотування. Використання космічних навігаційних систем стає можливим після установки на транспортний засіб спеціального приймача, який постійно отримує сигнали про місцезнаходження навігаційних супутників і відстані до них. Залежно від необхідної точності керування такою технікою здійснюється механізатором вручну за показаннями мітки на екрані дисплея, або з використанням пристрою або автопілотування, що підрулює.
Система паралельного водіння є найнаочнішою та швидко окупною частиною технології точного землеробства, призначена для проведення польових робіт та найбільш ефективна в умовах застосування з широкозахватною технікою.
Система паралельного водіння– це активна участь механізатора в керуванні машиною за схемою «вимірювання поточних координат сільгоспмашини – відображення відхилень від заданого маршруту на табло в кабіні – обертання механізатором рульового колеса для утримання агрегату на заданому маршруті» (рис. 3).
Рис. 3. Принцип функціонування приладу
На жаль, психомоторна реакція середньої людини не дозволяє здійснювати паралельне водіння з відхиленнями менше ±30 см, що також відповідає точності GPS-приймача, що спирається тільки на звичайні 24 супутники. У загальному випадку найпростіша система паралельного водіння складається з GPS-приймача із зовнішньою антеною та покажчика курсу. Системи легко та швидко встановлюються на трактор чи комбайн. Потрібне лише підключення до електроживлення та встановлення зовнішнього блоку (приймач GPS). Навчання механізаторів роботі з даним видом обладнання, залежно від бажаної «глибини» вивчення, становить від кількох хвилин до доби.
Необхідно відзначити, що використання приладів паралельного керування з точністю ведення агрегату ±30 см дуже обмежене і використовується в основному тільки на внесенні добрив. Для проведення ґрунтообробки, посіву, захисту рослин, збирання та низки інших операцій потрібна більш висока точність ведення агрегату. До складу обладнання для систем точнішого паралельного водіння входять:
навігаційний приймач із точністю позиціонування – до 10 см, здатний працювати на двох частотах (рис. 4);
дисплей (мал. 5) або світлодіодна панель (мал. 6);
контролер для розрахунку відхилень на нерівностях антени приймача та коригування напряму руху (рис. 7);
підрулюючий пристрій (рис. 10).
Існує кілька поширених способів коригування супутникових навігаційних сигналів для досягнення високої точності. Поправки можуть бути отримані від геостаціонарних супутників, що підвищить точність до ±10 см, так і від базової супутникової станції РТК (рис. 10), розташованої в безпосередній близькості від поля.
Принцип та системи автоматичного водіння (автопілот). Автопілотування відрізняється від паралельного керування тим, що відхилення від заданої траєкторії, що виробляються GPS-приймачем і навігаційним контролером, через спеціальні пристрої (керуючий клапан) (рис. 9) вводяться безпосередньо в гідравлічну систему управління ходовою частиною трактора, виключаючи інертність і люфт рульового управління. На додаток до трактора встановлюється спеціальний датчик кута повороту коліс (рис. 8). Така система забезпечує максимальну точність (відхилення ±2 см) руху маршрутом без втручання механізатора.
Основна перевага використання систем паралельного керування – зменшення помилок (зведення до мінімуму людського фактора) при обробці полів. Практика показує, що при обприскуванні культур традиційним способом більшість операторів вважають за краще проходити сусідні ряди з перекриттям, щоб уникнути перепусток. У результаті взаємне перекриття рядів, навіть із використанням пінних маркерів, становить щонайменше 5 %. Застосування покажчиків курсу з пристроями, що підрулюють, знижує перекриття до 2…3 % і менше.

Рис. 4. Приймач AgGPS 252
Приймач підтримує різні варіанти для поправок GPS, зокрема WAAD, OmniSTAR. Використання цих виправлень дозволяє забезпечити точність проходів до ±10 см.

Рис. 5. Світлодіодна панель AgGPS EZ-GUIDE PLUS або EZ-GUIDE 500
Панель у графічному вигляді показує поточне положення транспортного засобу та забезпечує водія додатковою інформацією при розворотах або керуванні вигнутими рядами. Вона має графічний екран з можливістю зчитування даних при яскравому сонячному світлі.
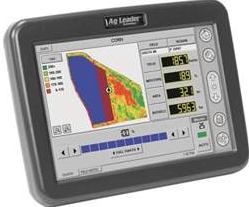
Рис. 6. Польовий комп'ютер Insight із програмним забезпеченням
Польовий комп'ютер із програмним забезпеченням – система управління польовими даними, що використовуються для навігації, автоматичного водіння, ведення записів, польової зйомки, майданної зйомки, додатків зі змінними показниками.

Рис. 7. Контролер AgGPS NAVCONTROLLER II
Контролер, використовуючи дані від GPS-приймача та внутрішніх датчиків, що перебувають у стані спокою та працюють по 6 осях, передає команди для системи управління.

Рис. 8 – Датчик кута повороту коліс
Датчик кута повороту коліс призначений для безперервного зворотного зв'язку із системою керування трактором.
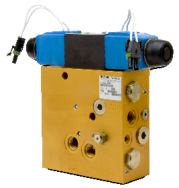
Рис. 9 – Керуючий клапан
Гідравлічний клапан отримує електричні сигнали від контролера і перетворює їх на гідравлічні, які система використовує для утримання транспортного засобу на заданому курсі.
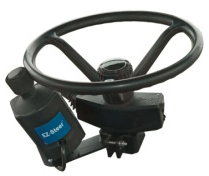
Рис. 10 – Підрулюючий пристрій
Підрулюючий пристрій забезпечує паралельне керування з точністю до 10 см.
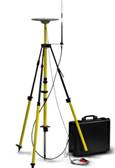
Рис. 11 – Базова станція (RTK)
Базова станція передає поправки GPS-положення на приймач GPS трактора через радіо або GSM-модем для визначення координат з високою точністю (похибка менше ±2 см).
Можливі варіанти розташування обладнання на тракторі для паралельного водіння та автопілотування показано на рис. 12.
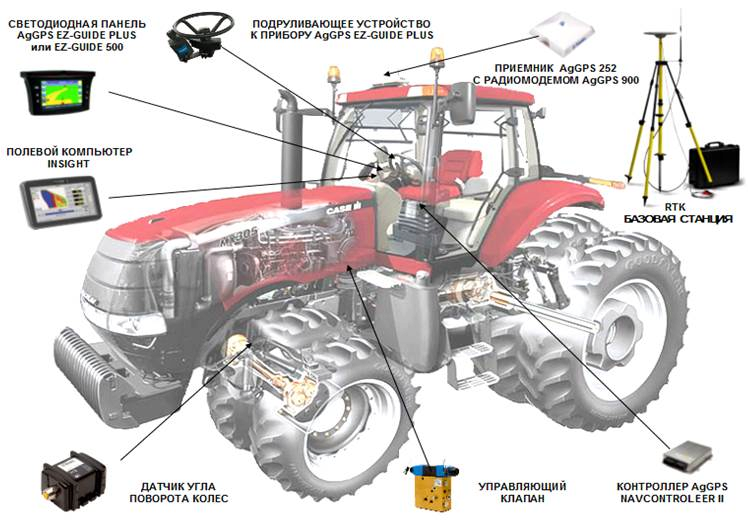
Рис. 12. Розташування обладнання для паралельного та автоматичного керування на тракторі (малюнок з сайту http://www.trimble.com/agriculture/autopilot.aspx)
Мінімальний набір для паралельного керування з точністю ±30 см показаний на рис. 13. Основними його компонентами є: світлодіодна панель, антена, установчий майданчик антени, стійка кріплення, набір сполучних кабелів, програмне забезпечення та інструкція з використання.
Дане обладнання затребуване у зв'язку з тим, що забезпечує економію коштів. Наприклад, у Європі економічний ефект від застосування GPS-обладнання у сільському господарстві сягає 50...60 євро на гектар.
До речі, звичайна супутникова навігація, що широко застосовується на автомобільному транспорті, може дати максимальну точність лише близько 2 м, що неприпустимо для технологій точного землеробства. Щодо систем навігації є поняття абсолютної та відносної точності. Абсолютна точність – це фактичні координати, з яких визначається місцезнаходження об'єкта, наприклад, будівлі, автомобіля, трактора чи комбайна. Для систем точного землеробства можна обмежитися відносною точністю, тобто поточним місцезнаходженням якогось об'єкта, наприклад, щодо першого проходу, на даний момент часу. Залежно від обладнання, що використовується, відносна точність повинна досягати значень порядку 2,5...30 см.
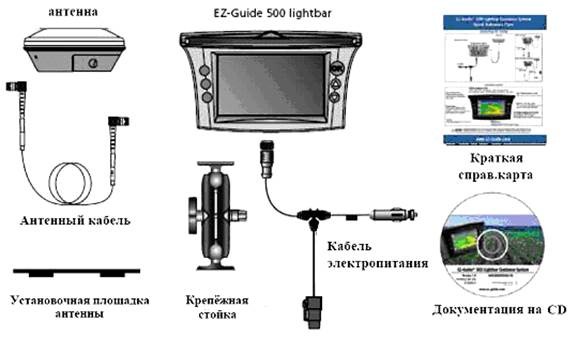
Рис. 13. Стандартні компоненти системи
Нині у світі діють кілька сервісів поправок, але у Росії працює лише одне – Omnistar HP/XP. Сервіс працює таким чином: компанія Omnistar має власну мережу базових станцій, що розташовані по всьому світу. Вони автоматично обчислюють необхідну корекцію сигналу, та був через геостаціонарні супутники передають поправку на конкретний GPS-приемник.
Додатково до диференціальних поправок широко застосовується режим RTK, у якому біля господарства розміщується своя стаціонарна чи переносна базова станція, і поправки на приймачі висилаються із неї радіосигналом із частотою 450 чи 900 МГц. При цьому не потрібно купувати передплату на кожен приймач, досягається досить висока відносна точність позиціонування, але, з іншого боку, потрібні значні разові витрати на придбання та встановлення обладнання. До того ж існує обмеження площі дії, що обумовлюється характеристиками сигналу. Так, для стаціонарної базової станції це обмеження – коло радіусом 11 км, у центрі якого знаходиться базова станція, для переносної – трохи менше. За кордоном кілька господарств об'єднують свої RTK для зниження загальних витрат і повнішого перекриття полів, при цьому також може здійснюватися перепродаж сигналу.
Так як точність керування безпосередньо залежить від точності вимірювань GPS-приймача, то дуже важливе знання механізаторами основних принципів роботи приймачів. На точність позиціонування впливає кілька основних факторів: тимчасові неузгодженості, кількість супутників, що одночасно спостерігаються, атмосферна інтерференція, варіації орбіт супутників, багатопроменеве поширення сигналу та ін.
Системи паралельного водіння та автопілотування допомагають точно дотримуватись відстані між проходами машин при виконанні польових робіт. При їх використанні технологічні операції виконуються з мінімальними перекриттями, економляться робочий та машинний час, паливно-мастильні матеріали, насіння, добрива та засоби захисту рослин. Навігація дуже зручна для обприскування, яке краще проводити вночі, коли нижча температура повітря та відсутня вітер. Таким чином, перевагами систем паралельного водіння є:
точність руху агрегатів по міжряддям;
зниження навантаження на тракториста (машиніста);
можливість роботи у темний час доби та в умовах поганої видимості.
Для цього системи паралельного водіння (рис. 14) мають спеціальний інтерфейс, що істотно полегшує роботу.
Рух може здійснюватися як по прямолінійних, так і по криволінійних траєкторіях (мал. 15), проте точність ведення, особливо при роботі з причіпними агрегатами, вища при русі прямими лініями.

Рис. 14. Навігаційний прилад EZ-Guide 500 Lightbar для системи «Автопілот» у роботі

Рис. 15. Можлива траєкторія руху агрегатів (малюнок з сайту http://www.geomir.ru/ag_navigation_ru)
Випробування навігаційної системи у Росії, проведені Центром «Геомір» у 2004 р. на площах ТОВ «Інтеко-Агро» у Білгородській області, показали: встановлення системи на непідготовлений трактор John Deere займає близько 10 хв.
Бригадою механізаторів з 12 осіб, які раніше не працювали з системою паралельного водіння, було оброблено поле культиватором «Горш» (18,3 м) по два проходи довжиною близько 800 м, при цьому помилка у відстані між рядами склала 25 см. Використовувалася поправка VBS супутника Omnistar. У систем паралельного водіння та автопілотів є одна особливість. "Серце" цих систем - GPS-приймач - відноситься до типу датчиків, ввезення та продаж яких на території Росії суворо контролюється державою. Тому їхня законна реалізація можлива лише після сертифікації та ліцензування. Для низки систем ці процедури вже проведено, і вони дозволені на продаж.
У табл. 1 представлені дані трирічних досліджень величин стикових міжрядь при посівах різних культур за маркером та з використанням системи «Автопілот» (рис. 16, 17) в РДАУ – МСХА імені К. А. Тімірязєва.
Таблиця 1.Значення ширини стикових міжрядь та відхилень від стандартної величини міжрядь сівалки
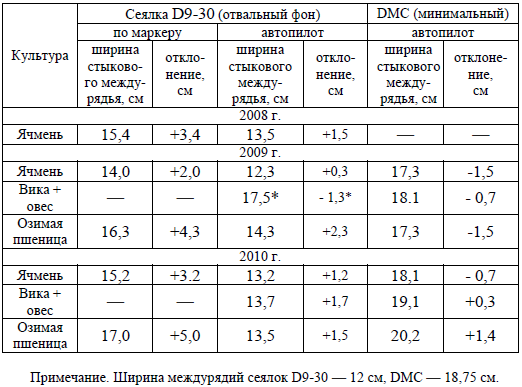

Рис. 16. Вид стикового міжряддя при сівбі за маркером

Рис. 17. Вид стикового міжряддя при сівбі з автопілота
Посів зернових культур (озимої пшениці та ячменю) проводився в одному випадку з автопілота, в іншому за маркером. При цьому посів озимої пшениці та ячменю на відвальному фоні здійснювався рядовою сівалкою D9-30 Amazone (далі за текстом D-9-30) із застосуванням системи «Автопілот» та маркера. За варіантом нульового (без обробки) та мінімального обробітку грунту проводився посів пневматичної сівалкою прямого посіву DMС Primera-3000 Amazone, (далі за текстом DMC) тільки з використанням автопілота. Посів вікоовсяної суміші проводився двома сівалками: D9-30 на оранці, DMС на нульовому варіанті тільки із застосуванням автопілота.
У ході досліджень спостерігалася неоднакова ширина стикових міжрядь між суміжними проходами сівалок при посіві зернових культур та віковівсяної суміші по маркеру та автопілоту. Так, у 2008 р. сівалкою D9-30 висівали ячмінь за варіантом відвального обробітку ґрунту. При цьому отримані відхилення значень стикових міжрядь від стандартної ширини міжрядь, передбачених конструкцією сівалки, у разі сівби ячменю за маркером 3,4 см, з використанням автопілота – 1,5 см.
Незважаючи на порівняно хороші середні значення відхилень (0,63 і 2,98 см у першому повторенні і 1,59 і 2,68 см у другому відповідно), посів ячменю за маркером (рис. 16) показав більшу розбіжність у параметрах стикових міжрядь – від +13,75 см до - 9,0 см. Така нестиковка міжрядь може мати негативне значення, особливо при вирощуванні просапних культур. При використанні системи "Автопілот" таких суттєвих відхилень не спостерігалося (рис. 17). Що ж до роботи автопілота на відвальному і мінімальному фоні, то відхилення на останньому мають менші значення, тому що на щільнішому ґрунті легше здійснюється управління трактором.
Необхідно відзначити ще одну важливу перевагу системи «Автопілот» у порівнянні з маркером. При роботі за системою нульового обробітку грунту слід від маркера, особливо в сутінки, не дуже добре видно. «Автопілот» дозволяє працювати в цілодобовому режимі. Одна ця обставина може суттєво підвищити ефективність робіт у сільському господарстві: два механізатори можуть працювати по черзі на одному тракторі без перерви 24 години на добу та проводити посівну у найкоротші та найкращі агротехнічні терміни (рис. 18).
У 2010 р. невідповідності у ширині стикових міжрядь для окремих культур виявилися таким чином. У озимої пшениці при посіві з відвальної обробки D9-30 по маркеру отримано відстань між суміжними проходами сівалки 5 см, у ячменю – 3,2 см. При посіві з автопілота отримані результати: 1,5 і 1,2 см відповідно. Для вікі з вівсом ця величина дорівнювала 1,7 см. Відхилення при посіві цих культур сівалкою DMС із використанням системи GPS склали: для озимої пшениці – 1,4 см; ячменю – 0,7 см; Вікі з вівсом -0,3 см. При ширині міжрядь сівалки 18,8 см дані невідповідності цілком допустимі.

Рис. 18. Робота в нічний час із використанням системи «Автопілот»
На просапних культурах, крім точної посадки, потрібне проведення міжрядних обробок. Тому при використанні навігаційних систем потрібна висока точність ведення агрегату.
У ході експериментів була спроба адаптувати систему «Автопілот» під міжрядну обробку картоплі. Під картоплю було обрано ділянку на схилі, щоб зробити роботу автопілота складнішою (рис. 19). У комп'ютер системи «Автопілот» у завдання для гребенеутворювача були завантажені траєкторії, пройдені картоплесаджалкою (рис. 20).
Автопілот легко справлявся з такими завданнями, які звичайному механізатору було б виконати дуже важко, оскільки трактор стягало вниз по схилу. Системі «Автопілот» вдавалося підрулювати трактор, що рухається майже боком. Як результат – ідеально прямолінійні гребені та дружні наступні сходи навіть на схилі (рис. 21).

Рис. 19. Посадка картоплі на схилі з використанням системи «Автопілот»

Рис. 20. Гребнеутворення картоплі з використанням системи «Автопілот»

Рис. 21. Ідеально прямолінійні гребені та сходи картоплі (посадка та гребнеутворення проводилися по автопілоту)
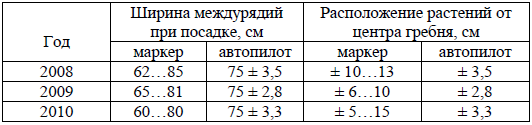
Посадка картоплі здійснювалася картоплесаджалкою GL-34T по автопілоту та по маркеру (див. рис. 19). Задана траєкторія руху агрегату, з використанням системи GPS, повторювалася на варіанті точного землеробства в ході проведення гребнеутворення на сходах картоплі. За традиційною технологією обробітку картоплі цей прийом проводився візуально, тобто рухом агрегату керував механізатор. Ширина міжрядь між проходами картоплесаджалки при використанні маркера та автопілота відрізнялася за окремими роками незначно, становлячи за традиційною технологією інтервал в середньому від 60…65 до 80…85 см, тобто відхилення від стандартного міжряддя сажалки (75 см) знаходилася в межах від - 15 до +10 см. Застосування системи "Автопілот" забезпечувало відхилення від прямолінійності суміжних рядків від 2,8 до 3,0 см (табл. 2).
Таблиця 2. Ширина стикових міжрядь та розташування рослин картоплі на гребені при різних технологіях вирощування
Важливою умовою розвитку повноцінної рослини картоплі є його розташування по відношенню до центральної частини гребеня, яке формується в ході проведення гребенеутворення після появи сходів. Гребнеутворення у посадках картоплі, що виробляються за традиційною технологією, забезпечувало формування рослин картоплі з відхиленнями від центру від 10 до 15 см (рис. 22b). Це призводило до односторонньої зміни наростання вегетативної частини, нерівномірності в утворенні та розвитку підземних бульб, а головне зниження якості продукції через появу великої кількостізеленої картоплі.

Рис. 22. Можливі проблемипри гребнеутворенні картоплі (робота без автопілота): a) звуження гребеня; b) відхилення від центру
При застосуванні технології точного землеробства рослини картоплі розташовувалися по центру рядка з відхиленням від 2,8 до 3,5 см. Поєднання двох проходів агрегату по полю, а саме, посадки та гребенеутворення картоплі представлені в табл. 3.
Таблиця 3. Частота народження (%) відхилень рослин картоплі від центру гребеня в досвіді РДАУ-МСХА імені К. А. Тімірязєва
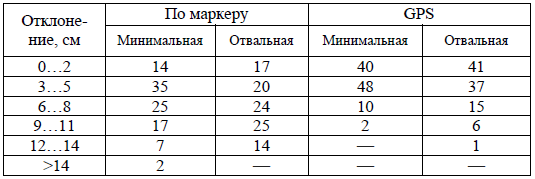
Проведення обробок із застосуванням автопілота на основі системи GPS з коригуванням сигналу в режимі реального часу показує високу точність. Так, на оранці критичні відхилення (рис. 23, позначення L) понад 8 см склали 7% випадків, на мінімальній обробці – 2%. При посадці по маркеру та окомірному гребнеутворення критичні відхилення зустрічаються частіше, відповідно в 39 і 26% випадків.
Таким чином, при роботі з просапними культурами до системи ГЛОНАСС та технічних засобів автоматичного ведення МТА пред'являються такі вимоги: ведення агрегатів у реальних польових умовах через накладання одного проходу на інший має досягати точності у відхиленнях кожного проходу не більше ±4 см по робочих органах у 95% випадків. В даний час таку точність забезпечує система GPSіз застосуванням додаткової базової станції.

Рис. 23. Ілюстрація та схема гребенеутворення у посадках картоплі: L – відстань від рослини до центру гребеня
Необхідно відзначити, що, крім високоточної системи обробки супутникових навігаційних сигналів, необхідна відповідна автоматична система управління трактором, оскільки жоден механізатор вручну не в змозі забезпечити необхідну точність руху. Скажімо, компанія John Deere вже на заводах встановлює свої трактори системи типу «Автопілот». Є й інші системи підрулювання, що реагують на відповідні навігаційні сигнали. Можна встановити сервопривід на кермо трактора, який теж буде автоматично керувати рухом машини. Однак установка такого сервоприводу на серійний трактор МТЗ-1221 не мала успіху через дуже «туге» кермо (зусилля повороту на кермі): електронна система сприймала це зусилля як спробу людини взяти управління «на себе» і автоматично відключалася. Зараз на Мінському тракторному заводі розпочато випуск тракторів з гідравлікою виробництва фірми Bosch (Sauer-Danfoss), і тепер можливо вдасться оснастити їх відповідними системами підрулювання.
Тенденція на сьогоднішній день така, що поза сумнівом, за системами паралельного водіння та автопілотами майбутнє сучасного сільськогосподарського виробництва.
Контрольні питання та завдання
1. У чому відмінності паралельного та автоматичного водіння автотракторної техніки?
2. Яке обладнання необхідне для здійснення паралельного та автоматичного водіння?
3. З якою метою призначена RTK-станція?
4. Якою є необхідна точність позиціонування техніки при посіві зернових культур?
5. Що мається на увазі під абсолютною точністю позиціонування?
6. Для яких цілей послуги поправок?
Увага! Це ознайомлювальний фрагмент книги.
Якщо початок книги вам сподобався, то повну версіюможна придбати у нашого партнера – розповсюджувача легального контенту ТОВ "ЛітРес".